على مدى عقود، اقتصرت الروبوتات على تخصصات محدودة، وكانت تعمل بشكل رئيسي في أداء المهام المتكررة داخل البيئات الصناعية المنظمة. واليوم، أحدث الذكاء الاصطناعي تحولاً جذرياً في علم الروبوتات، إذ أصبح بمقدور الروبوتات تفسير أوامر المستخدم وتنفيذها، إضافة إلى التكيف مع البيئات المتغيرة.
ندخل الآن عصر النمو المتسارع؛ حيث تقدر Citi أن 1.3 مليار روبوت ستنتشر حول العالم بحلول العام 2035، متجاوزة حدود المصانع لتصل إلى المنازل وقطاعات الخدمات. في المقابل، تتوقع Morgan Stanley أن يبلغ حجم سوق الروبوتات البشرية فقط أكثر من 5 تريليون دولار بحلول 2050.
ورغم أن هذا التوسع يخلق فرصاً ضخمة للسوق، إلا أنه يحمل تحديات كبيرة في المركزية، والثقة، والخصوصية، وقابلية التوسع. توفر تقنيات Web3 حلولاً نوعية لهذه المشكلات، عبر تمكين شبكات روبوتية لا مركزية، قابلة للتحقق، ومتعاونة، وتحافظ على الخصوصية.
في هذا الإصدار، نستعرض سلسلة القيمة المتطورة لروبوتات الذكاء الاصطناعي، مع تركيز خاص على الروبوتات البشرية، ونكشف عن فرص واعدة تنشأ من تقاطع الذكاء الاصطناعي في الروبوتات وتقنيات Web3.
سلسلة القيمة لروبوتات الذكاء الاصطناعي
تتألف سلسلة قيمة روبوتات الذكاء الاصطناعي من أربع طبقات رئيسة: المكونات الصلبة، الذكاء، البيانات، والوكيل. تترابط هذه الطبقات لإتاحة الروبوتات القدرة على الإدراك والتفكير واتخاذ القرار في بيئات واقعية معقدة.
شهدت طبقة المكونات الصلبة تطوراً لافتاً في السنوات الأخيرة بفضل رواد الصناعة مثل Unitree و Figure AI. ولا تزال هناك تحديات في الطبقات غير المادية، خصوصاً في محدودية البيانات عالية الجودة، غياب النماذج التأسيسية القابلة للتعميم، ضعف التوافق بين الهياكل المختلفة، والحاجة إلى الحوسبة الموزعة الموثوقة؛ لذا تبرز أهم فرص التطوير في طبقات الذكاء والبيانات والوكيل.
طبقة المكونات الصلبة: "الجسم"
أصبحت تقنيات بناء ونشر أجسام الروبوتات الحديثة أكثر سهولة من أي وقت مضى؛ إذ يوجد اليوم أكثر من 100 نوع من الروبوتات البشرية في الأسواق، منها Optimus من Tesla، وG1 من Unitree، وDigit من Agility Robotics، وFigure 02 من Figure AI.
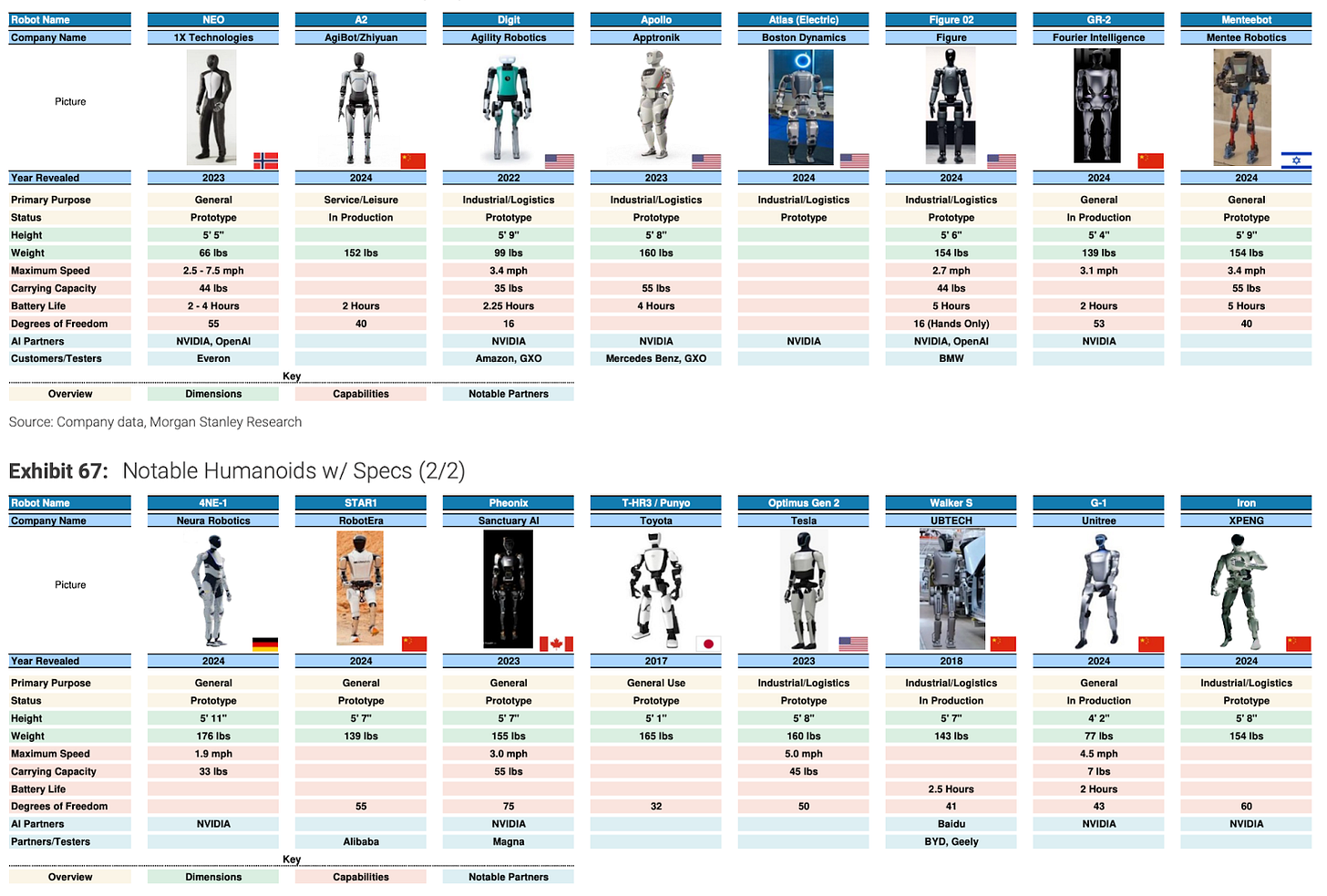
المصدر: Morgan Stanley، سلسلة القيمة للروبوتات البشرية: The Humanoid 100
يرتكز هذا التقدم على ثلاثة عناصر رئيسية:
- المشغلات (Actuators): وتُعد "عضلات" الروبوت، إذ تحول الأوامر الرقمية إلى حركات عالية الدقة. استفادت الروبوتات من التحسينات في المحركات الكهربائية عالية الأداء للحركة السريعة والضبط الدقيق، ومشغلات البوليمرات العازلة (Dielectric Elastomer Actuators – DEAs) للمهام الدقيقة؛ فظهر ذلك في Optimus Gen 2 من Tesla، الذي يوفر 22 درجة حرية (DoF)، وG1 من Unitree، وكلاهما يحقق براعة حركية شبه بشرية وتنقل متطوراً.
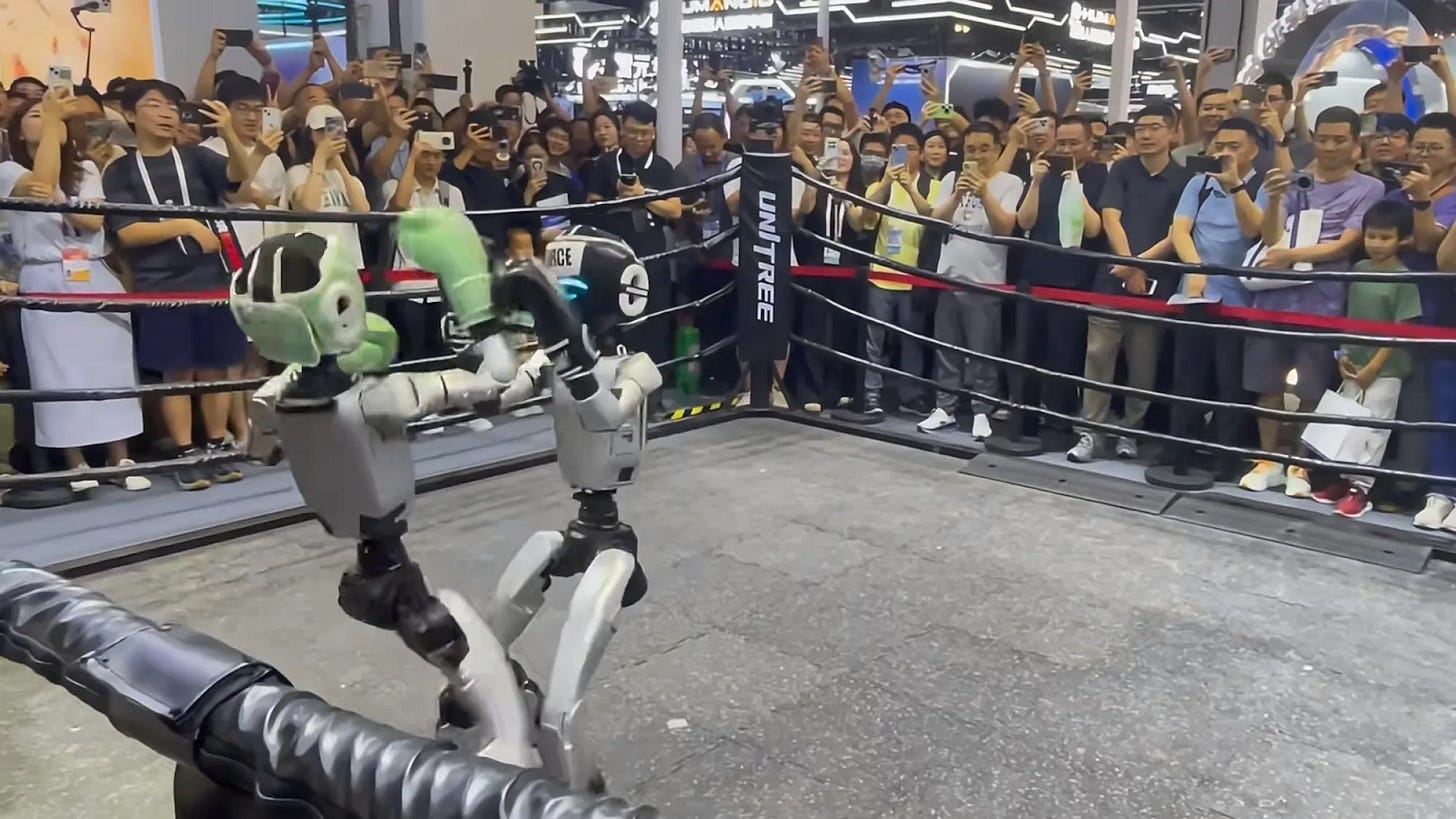
المصدر: أحدث روبوتات Unitree البشرية في عرض ملاكمة خلال WAIC 2025
المستشعرات (Sensors): تتيح للروبوتات إدراك البيئة وتفسيرها عبر الرؤية، LIDAR/RADAR، الإحساس اللمسي، والمداخل الصوتية، وتدعم التنقل الآمن، والحركة الدقيقة، والوعي بالمواقف.
الحوسبة المدمجة (Embedded Computing): تقوم وحدات المعالجة المركزية ووحدات معالجة الرسوم (CPU، GPU) ومسرّعات الذكاء الاصطناعي (TPU، NPU) بمعالجة بيانات المستشعرات في الوقت الحقيقي وتشغيل نماذج الذكاء الاصطناعي لاتخاذ قرارات ذاتية. يعزز الربط الموثوق منخفض التأخير التنسيق السلس، بينما تسمح هياكل الحوسبة الطرفية والسحابية المختلطة بنقل العمليات الحسابية المتقدمة حسب الطلب.
طبقة الذكاء: "العقل"
بينما تتطور المكونات الصلبة، يتحول التركيز نحو تطوير "عقل الروبوت": نماذج تأسيسية متقدمة وسياسات تحكم ذكية.
قبل دمج الذكاء الاصطناعي، اعتمدت الروبوتات على برمجيات تلقائية قائمة على القواعد، وكانت تفتقد القدرة على التعلم التكيفي.
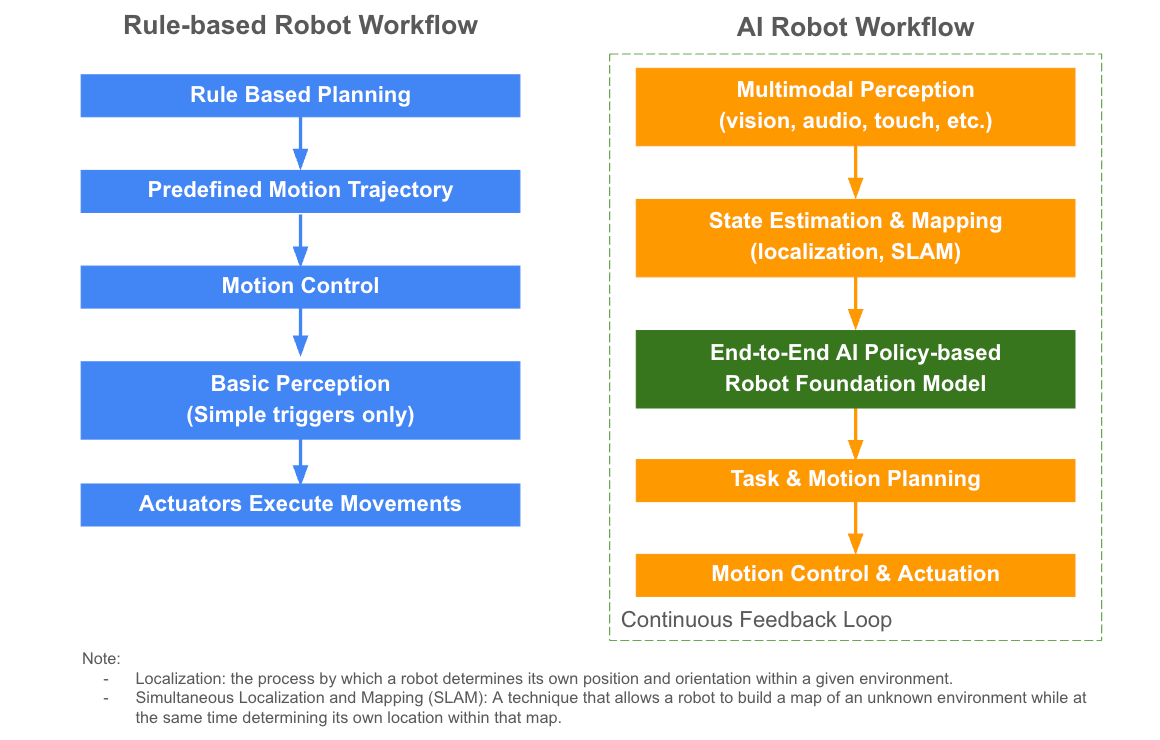
دخلت نماذج الأساس اليوم إلى علم الروبوتات؛ ومع ذلك، فإن نماذج اللغة الكبيرة متعددة الأغراض (LLMs) غير كافية وحدها، إذ يتعين على الروبوتات الإدراك والتخطيط والتنفيذ في بيئات مادية متغيرة. ولذا يتجه القطاع إلى تطوير نماذج تأسيسية روبوتية قائمة على السياسات من البداية للنهاية. تمكّن هذه النماذج الروبوتات من:
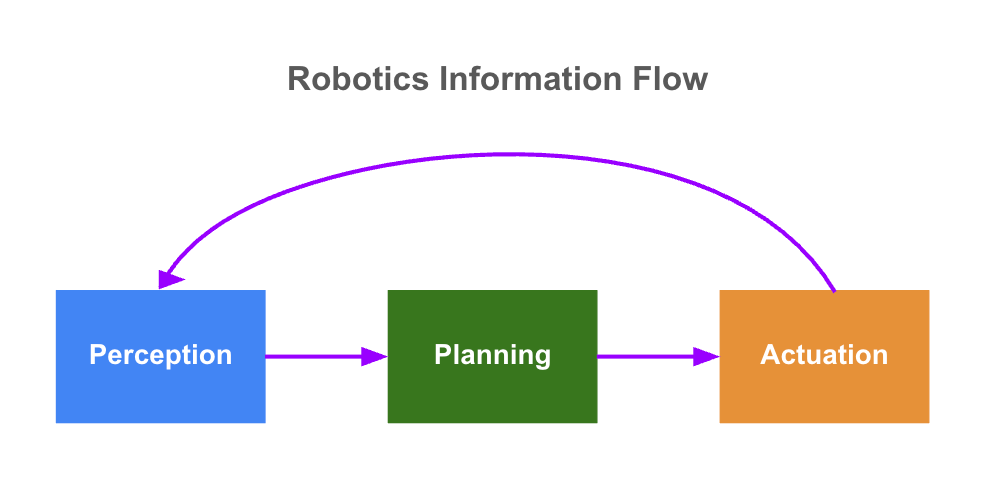
- الإدراك: استيعاب بيانات المستشعرات الخام متعددة الأنماط، كالرؤية، والصوت، واللمس.
- التخطيط: تقدير الحالة الذاتية، رسم خرائط للبيئة، تفسير التعليمات المعقدة—والانتقال مباشرة من الإدراك إلى الفعل دون الكثير من البرمجة اليدوية.
التنفيذ: إعداد خطط الحركة وإرسال أوامر التحكم لتنفيذها فورياً.
تتعلم هذه النماذج سياسات عامة للتفاعل مع العالم، ما يمنح الروبوتات قدرة على التكيف مع المهام المتنوعة والعمل بذكاء واستقلالية متزايدة. وتستفيد النماذج المتقدمة من التغذية الراجعة المستمرة، مما يتيح للروبوت اكتساب الخبرة وتحسين الأداء في البيئات الديناميكية.
تتصدر نماذج الرؤية-اللغة-الحركة (Vision-Language-Action – VLA) بنية النماذج التأسيسية للروبوتات حالياً؛ إذ تربط المدخلات الحسية (خصوصاً البيانات المرئية والتعليمات اللغوية) بالإجراءات مباشرة، فيستجيب الروبوت لما "يراه" و"يسمعه" عبر أوامر تحكم ملائمة. ومن أهم الأمثلة: RT-2 من Google، Isaac GR00T N1 من NVIDIA، وπ0 من Physical Intelligence (π).
لتطوير هذه النماذج، يُدمج غالباً عدة أساليب مكمّلة، منها:
نماذج العالم (World Models): إنشاء محاكاة داخلية للبيئة المادية تساعد الروبوتات على تعلم سلوكيات معقدة، والتنبؤ بالنتائج، وتخطيط التحركات. وبرز في ذلك إطلاق Google لنموذج Genie 3 الذي يخلق بيئات تفاعلية متنوعة وغير مسبوقة.
- التعلم المعزز (Deep Reinforcement Learning): يدرب الروبوتات على اكتساب السلوكيات عبر التجربة والخطأ.
- التحكم عن بعد (Teleoperation): يسمح بالتشغيل عن بُعد ويوفر بيانات خاصة بالتدريب.
التعلم بالمشاهدة (Learning from Demonstration – LfD) / التعلم بالمحاكاة (Imitation Learning): يعلّم الروبوت مهارات جديدة عبر تقليد حركات الإنسان.
يوضح الرسم التالي كيف تتكامل هذه الأساليب في تطوير النماذج التأسيسية للروبوتات.
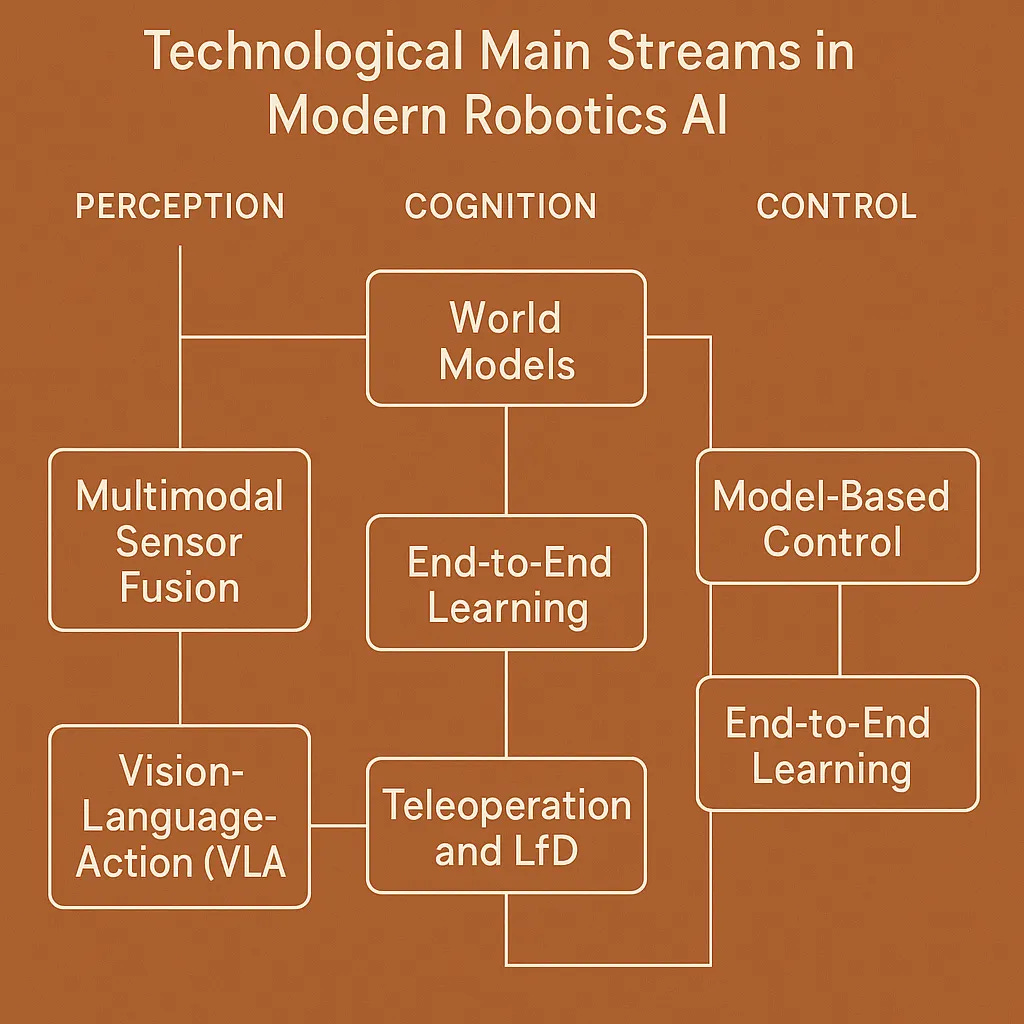
المصدر: نماذج العالم: جوهر الذكاء الفيزيائي المؤدي إلى الذكاء الاصطناعي العام
شهد القطاع مؤخراً إنجازات مفتوحة المصدر بارزة—منها π0 من Physical Intelligence (π) وIsaac GR00T N1 من NVIDIA—لكن معظم النماذج التأسيسية للروبوتات ما تزال مركزية ومغلقة المصدر. وتحتفظ شركات مثل Covariant وTesla بالبرمجيات وقواعد البيانات المملوكة لها، نظراً لضعف الحوافز للانفتاح.
غياب الشفافية يعوق التعاون والتشغيل البيني بين المنصات، ويبرز الحاجة لمشاركة نماذج آمنة وشفافة، ومعايير إدارية مجتمعية على السلسلة، وطبقة توافق بين الهياكل؛ ما يعزز الثقة ويقوي التنمية في القطاع.
طبقة البيانات: "المعرفة" للعقل
تعتمد جودة مجموعات بيانات الروبوتات على ثلاث ركائز: الكمية، والجودة، والتنوع.
رغم الجهود المتواصلة، فإن حجم بيانات الروبوتات الحالي لا يزال محدوداً جداً. فعلى سبيل المثال، تم تدريب GPT-3 من OpenAI على 300 مليار رمز، بينما تضمّ مجموعة بيانات الروبوتات المفتوحة الأكبر—Open X-Embodiment—أكثر قليلاً من مليون تسلسل روبوت واقعي عبر 22 نوعاً، أي أقل بكثير من المطلوب للتعميم الفعّال.
تساهم طرق الملكية، مثل مصانع البيانات لدى Tesla حيث يرتدي العاملون بدلات التقاط الحركة لإنتاج بيانات التدريب، في جمع بيانات حركة أكثر واقعية، لكنها مكلفة، وتفتقر للتنوع، وتواجه صعوبات في التوسع.
لمعالجة هذه التحديات، تعتمد الروبوتات على ثلاثة مصادر رئيسية للبيانات:
- بيانات الإنترنت: ضخمة وسهلة التوسع، لكنها ملاحِظة في الغالب ولا توفر إشارات حركية فعليّة. يوفر التدريب الأولي لنماذج الرؤية-اللغة الكبيرة (مثل GPT-4V وGemini) على بيانات الإنترنت أساسيات دلالية وبصرية قيّمة. كما أن توصيف الفيديوهات بملصقات حركية يحول اللقطات الخام إلى بيانات تدريبية قابلة للاستخدام.
- البيانات الاصطناعية: تُنشأ عبر المحاكاة، ما يسمح بالتجارب السريعة والواسعة والتنوع الكبير في السيناريوهات، لكنها لا تُمثل التعقيد الواقعي بالكامل (وهي ما يُعرف بفجوة "sim-to-real"). يعالج الباحثون ذلك عبر تكيفات النطاق (كنمذجة التوزيعات، والتعلم العدائي)، ونقل التعلم من المحاكاة للواقع، وتحسين النماذج دورياً عبر الاختبار وتعديلها في الواقع.
البيانات الواقعية: على الرغم من أنها محدودة ومكلفة، إلا أنها ضرورية لجعل النماذج أكثر دقة وتقليل فجوة المحاكاة. وغالباً ما تتضمن الرؤية الذاتية للروبوت أثناء المهام وبيانات الحركة الدقيقة، التي تُجمع عادةً عبر عروض بشرية أو تحكم عن بعد أو تعليم مباشر، لضمان تعلم يتوافق مع العالم الواقعي.
تظهر الأبحاث أن الجمع بين مصادر الإنترنت والبيانات الواقعية والاصطناعية في تدريب الروبوتات يسهم بفعالية أكبر في قوة وكفاءة النماذج مقارنة بالاعتماد على مصدر واحد فقط.
ورغم أن كثرة البيانات مفيدة، يبقى التنوع أهم لتحقيق التعميم في المهام والهياكل المختلفة. ويتطلب ذلك منصات بيانات مفتوحة ومشاركة تعاونية، وإنشاء مجموعات بيانات عبر الهياكل لدعم نماذج تأسيسية أكثر قوة.
طبقة الوكيل: "الوكيل الفيزيائي الذكي"
يُسرّع التوجه نحو وكلاء الذكاء الاصطناعي الفيزيائي—أي الروبوتات الذاتية في العالم الواقعي—بفضل النماذج المضبوطة بدقة، التعلم المستمر، والتكيف العملي حسب هيكل كل روبوت.
وتشمل أبرز الفرص لتسريع تطور وكلاء الذكاء الاصطناعي الفيزيائي:
- التعلم المستمر والبنية التحتية التكيفية: أنظمة تساعد الروبوتات على التحسن باستمرار عبر دائرة تغذية راجعة لحظية وتبادل الخبرات أثناء التشغيل.
- اقتصادات الوكلاء المستقلين: روبوتات تعمل كوكلاء اقتصاديين مستقلين، تتبادل موارد الحوسبة وبيانات المستشعرات في أسواق متخصصة وتحقق عائدات عبر الخدمات الرمزية.
- أنظمة متعددة الوكلاء: منصات وخوارزميات متقدمة تتيح للأساطيل الروبوتية التنسيق والتعاون وتحسين الأداء الجماعي.
التقاطع بين الذكاء الاصطناعي في الروبوتات وتقنيات Web3: فتح سوق ضخم
بينما تنتقل الروبوتات المدعومة بالذكاء الاصطناعي من مختبرات البحث إلى بيئات العالم الواقعي، تظهر تحديات رئيسية—من مركزية البيانات والنماذج، وفجوات الثقة والمصدر، إلى قيود الخصوصية والامتثال وضعف التشغيل البيني—وهي تحديات تعيق الابتكار وتعرقل بناء منظومات روبوتية قوية وقابلة للتوسع اقتصادياً.
نقاط ضعف الروبوتات المدعومة بالذكاء الاصطناعي
العزلة المركزية للبيانات والنماذج
تعتمد النماذج الروبوتية على بيانات ضخمة متنوعة، لكن التطوير الحالي مركزي، متجزئ، ومكلف، مما يخلق أنظمة أقل مرونة وتنوعاً. غالباً ما تعاني الروبوتات من ضعف الأداء في البيئات المتغيرة نتيجة نقص البيانات والتنوع.
الثقة والمصدر والمصداقية
غياب سجلات شفافة وقابلة للتدقيق حول مصادر البيانات، تدريب النماذج، وتشغيل الروبوتات يعيق الثقة والمساءلة، ويشكل عقبة أمام المستخدمين والجهات التنظيمية والشركات.
الخصوصية والأمان والامتثال
تتطلب التطبيقات الحساسة كالرعاية الصحية والمنزلية حماية صارمة للخصوصية والامتثال لمعايير صارمة، خصوصاً في أوروبا (مثل GDPR). وتتقاعس البنى المركزية عن تقديم تعاون آمن يحافظ على الخصوصية، مما يقيد مشاركة البيانات ويعيق الابتكار.
قابلية التوسع والتشغيل البيني
تواجه أنظمة الروبوتات صعوبات في مشاركة الموارد والتعلم الجماعي والدمج عبر المنصات والهياكل المختلفة، ما يؤدي لتجزئة الشبكة وإبطاء نقل القدرات بين الأنواع.
حلول Web3 الهيكلية: فرص استثمارية جديدة
تعالج Web3 هذه التحديات عبر شبكات روبوتية لا مركزية وقابلة للتحقق وتدعم الخصوصية والتعاون، وتفتح بذلك أسواقاً جديدة:
التطوير التعاوني الديمقراطي: شبكات مدفوعة بالحوافز، تُمكن الروبوتات من مشاركة البيانات وتطوير النماذج والوكلاء بشكل جماعي.
- إثبات الأصل والمساءلة: تضمن البلوك تشين سجلات غير قابلة للتجاوز لسلالة البيانات والنماذج، وهوية وسجل الروبوتات، ما يعزز الثقة والامتثال.
- التعاون المحافظ على الخصوصية: تتيح حلول التشفير المتقدمة للروبوتات تدريب النماذج ومشاركة المعلومات دون كشف البيانات.
- الحوكمة المجتمعية: تمنح المنظمات المستقلة اللامركزية (DAO) قواعد وسياسات شفافة للرقابة الجماعية على السلسلة.
- التشغيل البيني بين الهياكل: تتيح أطر البلوك تشين المنفتحة التنسيق بين منصات الروبوتات المختلفة، ما يقلل التكاليف ويسرّع نقل القدرات.
- اقتصادات الوكلاء الذاتيين: تُمكّن بنية Web3 الروبوتات من التصرف كوكلاء مستقلين، وعقد صفقات مباشرة، والمشاركة في أسواق رمزية بدون تدخل بشري.
شبكات البنية التحتية اللامركزية (DePIN): مشاركة موارد الحوسبة والاستشعار والتخزين عبر البلوك تشين تعزز قابلية التوسع ومرونة الشبكات الروبوتية.
نستعرض بعض المشاريع الناشئة التي تقدم نماذج للابتكار والزخم في المجال. ويُرجى اعتبار ذلك معلومات فقط وليس نصيحة مالية.
تطوير البيانات والنماذج اللامركزي
تتيح منصات Web3 ديمقراطية هذه العمليات عبر الحوافز، إذ يمكن للمشاركين جمع بيانات الحركة، ومشاركة المستشعرات، وتحميل الصور، وإنتاج البيانات الاصطناعية لتدريب النماذج، ما يعزز التنوع والواقعية ويغطي الحالات النادرة بفعالية أكبر من أي شركة منفردة.
مثال:
Frodobots: بروتوكول لجمع البيانات الواقعية عبر ألعاب الروبوتات. أطلقوا Earth Rovers، وهو روبوت الأرصفة ولعبة "القيادة من أجل الكسب" العالمية. نجح الفريق في تكوين FrodoBots 2K Dataset: قاعدة بيانات متنوعة تشمل لقطات الكاميرا وGPS والصوت وبيانات التحكم البشري من قرابة 2,000 ساعة عمل في أكثر من 10 مدن.
- BitRobot: تعاون بين FrodoBots Lab وProtocol Labs، وهو منصة مدفوعة بالعملات الرقمية مبنية على Solana وشبكات فرعية مفتوحة التحديات. يتيح للمشاركين إضافة نماذج أو بيانات وكسب مكافآت رمزية بشكل مستمر.
- Reborn Network: طبقة أساسية لنظام روبوتات AGI مفتوح. توفر Reborn بدلة Rebocap لجمع وتحقيق الدخل من الحركات الواقعية، ما يسهم في تطوير مجموعات بيانات روبوتات بشرية متقدمة.
PrismaX: بنية تحتية لا مركزية تعزز تنوع وموثوقية البيانات عبر مجتمع عالمي، وتطبّق آليات التحقق والمكافآت لجمع بيانات بصرية واسعة النطاق بكفاءة.
إثبات الأصل والمصداقية
تسمح البلوك تشين بالشفافية الكاملة والتحقق عبر منظومات الروبوتات، وتؤمّن توثيق أصل البيانات والنماذج وهوية الروبوتات وسجل التشغيل والمساهمين، إلى جانب أنظمة تقييم السمعة على السلسلة والتحقق الجماعي لضمان الجودة.
مثال:
OpenLedger: بنية ذكاء اصطناعي وبلوك تشين لتطوير ونشر نماذج متخصصة عبر مجموعات بيانات مجتمعية، وتستخدم آلية إثبات النسبة لمكافأة أصحاب البيانات عالية الجودة.
الملكية والترخيص وتحقيق الدخل الرمزي
تتيح أدوات الملكية الفكرية الأصلية لـWeb3 ترخيص مجموعات البيانات والقدرات والنماذج والوكلاء الذكيين عبر الرموز، ويمكن إدراج شروط الترخيص في الأصول تلقائياً عبر العقود الذكية مع دفع الإتاوات عند إعادة استخدامها، ما يعزز الشفافية والوصول المفتوح ويخلق أسواق بيانات عادلة.
مثال:
Poseidon: طبقة بيانات لامركزية مبنية على Story Protocol، تقدم بيانات تدريب مرخصة للذكاء الاصطناعي.
الحلول المحافظة على الخصوصية
يصعب جمع البيانات القيمة كبيانات المستشفيات أو المنازل من المصادر العامة، لكنها ضرورية لتحسين أداء النماذج التأسيسية. تحويل هذه البيانات لأصول رمزية آمنة مع حلول تشفيرية يضمن إمكانية تتبعها واستثمارها مع الحفاظ على الخصوصية، مثل بيئات التنفيذ الموثوقة (TEEs) وإثباتات المعرفة الصفرية (ZKPs)، ما يمكّن المؤسسات من تدريب نماذج الذكاء الاصطناعي على بيانات موزعة وحساسة دون المساس بالخصوصية أو الامتثال التنظيمي.
مثال:
Phala Network: تمكن المطورين من نشر التطبيقات في بيئات TEEs الآمنة لمعالجة الذكاء الاصطناعي والبيانات بسرية.
الحوكمة المفتوحة والمساءلة
تعتمد الأنظمة الروبوتية غالباً على منصات مغلقة تفتقر للشفافية والتكيف، وتُعد الحوكمة الشفافة ضرورة لتعزيز الثقة وتقليل المخاطر، حيث تتيح Web3 حوكمة جماعية مفتوحة المصدر عبر السلسلة وتطوير ذكاء روبوتي تعاوني.
مثال:
Openmind: بيئة برمجية مفتوحة للذكاء الاصطناعي تتيح للروبوتات التعاون والتعلم والعمل معاً، وتضم معيار ERC7777 لتأسيس منظومة تتحقق منها القواعد والحقوق والمسؤوليات وتدير الهويات البشرية والروبوتية بفاعلية.
ختاماً
يؤذن تقاطع الذكاء الاصطناعي في الروبوتات وتقنيات Web3 بعصر جديد للأنظمة الذاتية، القادرة على التعاون والتكيف الواسع. ومع تقدم المكونات الصلبة، ستكون السنوات الثلاث إلى الخمس المقبلة حاسمة لتطوير نماذج ذكاء اصطناعي أكثر قوة بالاعتماد على بيانات واقعية وتنسيق لامركزي. ومن المرجح أن نشهد صعود وكلاء ذكاء اصطناعي متخصصين في قطاعات الضيافة والخدمات اللوجستية وغيرها، ما يخلق فرصاً ضخمة للسوق.
ورغم تفاؤلنا بهذا التقاطع بين الروبوتات والذكاء الاصطناعي والعملات الرقمية، إلا أن التحديات مستمرة في تصميم آليات حوافز متوازنة وفعّالة، وضمان حلول تقنية قوية وقابلة للتوسع تواكب التنوع في الهياكل الروبوتية، إضافة إلى بناء أنظمة خصوصية فعّالة تلبي ثقة أصحاب المصلحة، خصوصاً في التعامل مع البيانات الحساسة. كما أن المشهد التنظيمي يزداد تعقيداً ويحتاج إلى إدارة دقيقة للامتثال عبر الأسواق. التصدي لهذه المخاطر وتحقيق عوائد مستدامة أمر جوهري للتقدم والانتشار الواسع.
لنواصل المتابعة والتفاعل مع هذه التطورات—فبالتعاون، يمكننا دفع عجلة التقدم واقتناص فرص واعدة في هذا السوق المتنامي.
الابتكار في الروبوتات رحلة لا تزدهر إلا بالعمل الجماعي.
وأتقدم بالشكر إلى فريق Chain of Thought على Robotics & The Age of Physical AI لما قدمه من رؤى أثرت بحثي.
تنويه:
- هذا المقال أعيد نشره من [merakiki.eth]. جميع الحقوق محفوظة للمؤلف الأصلي [@merakikieth">merakiki]. في حال وجود أي اعتراض على إعادة النشر، يرجى التواصل مع فريق Gate Learn وسيتم معالجة الأمر على الفور.
- إخلاء مسؤولية: الآراء والمعلومات في هذا المقال تعبّر عن رأي الكاتب فقط، ولا تمثل نصيحة استثمارية بأي شكل.
- تتم ترجمة المقال إلى لغات أخرى من قبل فريق Gate Learn ويُحظر نسخ أو توزيع أو اقتباس المقالات المترجمة ما لم يُذكر خلاف ذلك.