A medida que la tecnología de IA pasa del mundo digital al físico, los robots, los dispositivos autónomos y los sistemas automatizados se convierten en pilares fundamentales de la infraestructura de IA de nueva generación. Desde robots humanoides hasta máquinas autónomas, cada vez más sistemas de IA cuentan con capacidades de actuación en el mundo real, lo que atrae más capital y atención tecnológica hacia la economía robótica.
Sin embargo, la robótica tradicional ha estado lastrada por altas barreras de financiación, centralización del capital y escasa liquidez. El equipo robótico suele ser un negocio de activos intensivos, con largos ciclos de I+D y elevados costes de implantación, lo que dificulta que los usuarios particulares se beneficien directamente del crecimiento del sector. RCM se diseñó para superar este reto aprovechando la infraestructura Web3.
¿Qué son los mercados de capital robóticos?
Propuesto por XMAQUINA como mecanismo de coordinación de capital on-chain para la economía robótica, los mercados de capital robóticos (RCM) buscan gobernar, financiar y asignar recursos a activos robóticos e infraestructura automatizada dentro de una red abierta.
Mientras que los mercados de capital tradicionales se ocupan de acciones, bonos y financiación corporativa, RCM traslada parte de la lógica del capital del sector robótico a un entorno on-chain. Su objetivo no es simplemente "negociar activos robóticos", sino construir un nuevo marco de colaboración en torno a la economía robótica.
RCM suele abarcar:
- Equipos robóticos
- Infraestructura automatizada
- Máquinas autónomas
- Sistemas hardware impulsados por IA
- Redes de IA física
- Estructuras de tesorería y gobernanza vinculadas a robots
Dentro del ecosistema de XMAQUINA, RCM actúa como módulo esencial que conecta la gobernanza DAO, los activos robóticos y el capital on-chain.
Por qué la robótica necesita mercados de capital on-chain
A diferencia del sector internet tradicional, la robótica exige una fuerte inversión en hardware y capital a largo plazo para I+D y operaciones.
Por ejemplo:
- Los robots humanoides requieren fabricación compleja de hardware
- Los sistemas automatizados necesitan mantenimiento continuo
- La robótica con IA conlleva altos costes de hashrate y equipamiento
- Las máquinas autónomas precisan actualizaciones y despliegue constantes
La robótica tradicional suele recurrir a capital riesgo, financiación corporativa y capital institucional, pero este modelo presenta varios inconvenientes claros:
| Problema |
Impacto |
| Altas barreras de financiación |
Los usuarios particulares no pueden participar fácilmente. |
| Baja liquidez |
Los activos robóticos son difíciles de negociar. |
| Centralización del capital |
El poder de decisión recae en pocas instituciones. |
| Escasa eficiencia colaborativa |
Cuesta que se formen ecosistemas abiertos. |
RCM aborda estos problemas mediante gobernanza on-chain y coordinación DAO para reducir las barreras de entrada y construir una estructura de capital más abierta para la economía robótica.
Cómo lleva RCM los activos robóticos a la cadena
Llevar activos robóticos a la cadena va más allá de «emitir tokens». Emplea gobernanza on-chain, mapeo de activos y coordinación de capital para que parte de los recursos de la economía robótica colaboren dentro de la red Web3.
RCM suele constar de varios componentes clave:
Estructura de gobernanza DAO
La DAO coordina la gobernanza y la toma de decisiones en la economía robótica, incluyendo gestión de tesorería, actualizaciones de protocolo y despliegue de recursos.
En XMAQUINA, DEUS y xDEUS se usan para gobernar y votar.
Mecanismo de coordinación de activos
Como los activos robóticos suelen tener atributos del mundo real, se necesitan protocolos on-chain para establecer la lógica de gobernanza y coordinación.
Este proceso puede incluir:
- Mapeo de activos
- Coordinación de rendimientos
- Gestión de tesorería
- Despliegue de capital
- Colaboración subDAO
Mecanismo de financiación on-chain
RCM busca crear un nuevo modelo de financiación para la economía robótica mediante gobernanza comunitaria y una estructura de capital abierta.
A diferencia de la financiación privada tradicional, la gobernanza on-chain fomenta la participación comunitaria y la colaboración transparente.
Infraestructura de IA física
RCM no solo abarca los aspectos financieros, sino también la infraestructura robótica y de IA subyacente.
En qué se diferencia RCM de los RWA tradicionales
RCM comparte ciertos puntos en común con los activos del mundo real (RWA), ya que ambos combinan recursos reales con estructuras on-chain.
Sin embargo, su enfoque difiere notablemente:
| Dimensión |
RCM |
RWA tradicional |
| Objeto central |
Robots e IA física |
Inmuebles, bonos, etc. |
| Modelo de gobernanza |
Impulsado por DAO |
Mapeo de activos financieros |
| Atributo del activo |
Infraestructura dinámica |
Activos financieros estáticos |
| Objetivo |
Colaboración en la economía de máquinas |
Liquidez de activos financieros |
| Estructura de red |
Redes autónomas |
Estructura de productos financieros |
Los RWA tradicionales se centran en representar activos financieros en la cadena, mientras que RCM pone el acento en la colaboración, la gobernanza y la expansión de infraestructura dentro de la economía robótica.
En qué se diferencia RCM de los modelos de financiación robótica tradicionales
La robótica tradicional se apoya en financiación mediante capital, inversión de capital riesgo o capital corporativo.
RCM intenta establecer una lógica de colaboración distinta mediante DAO y estructuras de capital on-chain.
Las diferencias clave son:
| Dimensión |
RCM |
Financiación robótica tradicional |
| Método de participación |
Gobernanza DAO |
Inversión institucional |
| Estructura de capital |
Red on-chain abierta |
Capital privado |
| Liquidez |
Mayor |
Menor |
| Método de gobernanza |
Colaboración comunitaria |
Decisiones corporativas |
| Accesibilidad |
Más abierta |
Mayor barrera de entrada |
Este modelo no sustituye a la financiación tradicional, sino que explora nuevas vías de coordinación del capital dentro de la economía robótica.
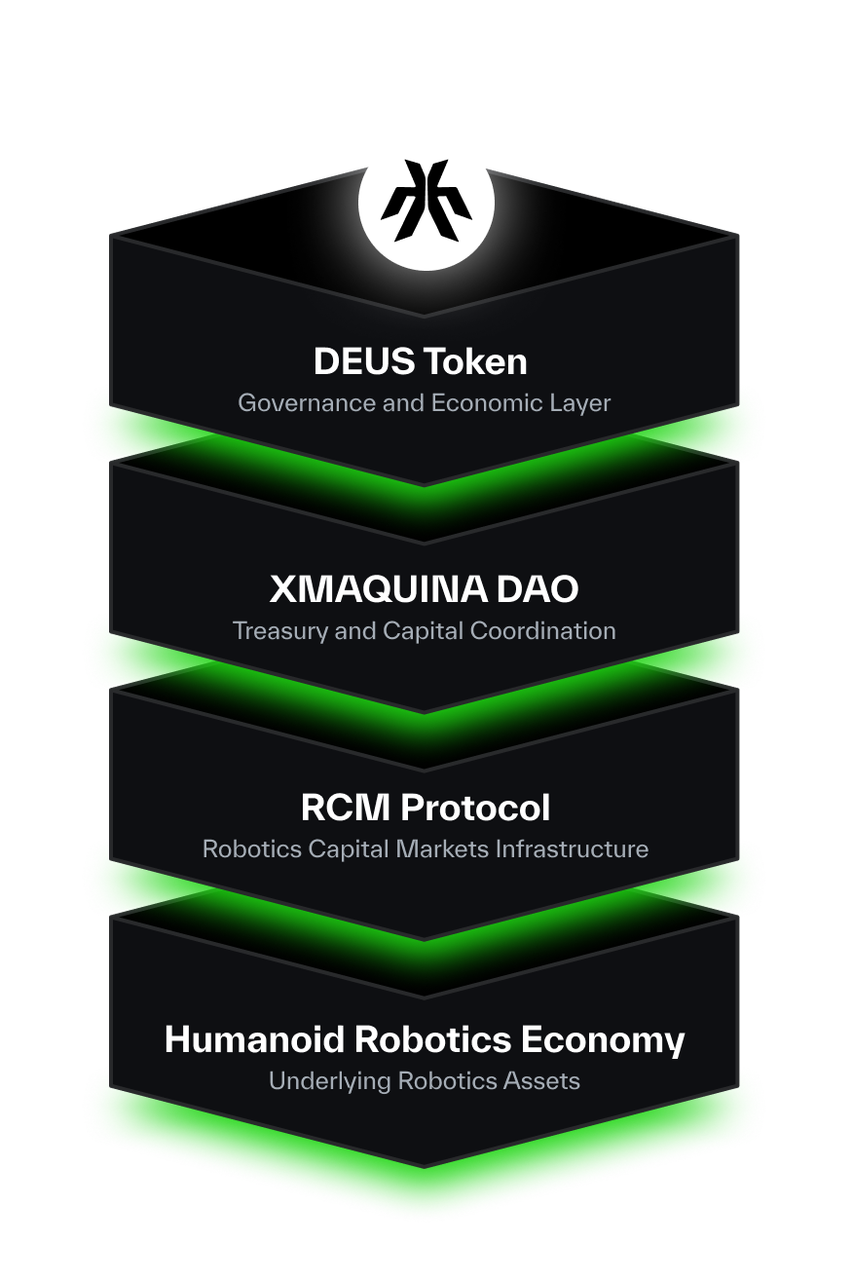
¿Qué papel desempeña DEUS en RCM?
DEUS es el token de gobernanza del ecosistema XMAQUINA y una herramienta clave de coordinación dentro de la estructura RCM.
Sus funciones principales incluyen:
- Gobernanza DAO
- Gestión de tesorería
- Votación de propuestas
- Coordinación subDAO
- Asignación de recursos del ecosistema
Los usuarios pueden poner DEUS en staking para obtener xDEUS y participar en la gobernanza.
Este mecanismo transforma RCM de un simple mercado de activos en una red de gobernanza centrada en la economía robótica.
¿Qué desafíos potenciales afronta RCM?
Aunque RCM plantea un enfoque novedoso para llevar la economía robótica a la cadena, esta dirección aún está en una fase temprana.
Los posibles desafíos incluyen:
- Valoración compleja de los activos robóticos
- Gran dificultad para gobernar activos del mundo real
- Inmadurez del sector de IA física
- Incertidumbre en la eficiencia de la coordinación DAO
- Marcos regulatorios y de cumplimiento aún en desarrollo
Además, la propia robótica tiene altas barreras técnicas y requiere inversión a largo plazo. Por tanto, el desarrollo de RCM está estrechamente ligado a la madurez general del sector de IA física.
Resumen
Los mercados de capital robóticos (RCM) son un mecanismo de mercado de capital on-chain construido en torno a la economía robótica y la IA física. Mediante DAO, tokenización y gobernanza on-chain, crean nuevos modelos de financiación y colaboración para activos robóticos e infraestructura automatizada.
En comparación con la financiación robótica tradicional, RCM apuesta por la participación abierta, la gobernanza comunitaria y la coordinación de capital on-chain. Su objetivo no es solo mejorar la liquidez de los activos robóticos, sino también impulsar la evolución de la economía de máquinas hacia una red abierta.
Preguntas frecuentes
¿Cuál es la diferencia entre RCM y los RWA tradicionales?
Los RWA tradicionales se centran en llevar activos financieros a la cadena, mientras que RCM se centra en la colaboración en la gobernanza de activos robóticos, IA física y la economía de máquinas.
¿Por qué la robótica necesita mercados de capital on-chain?
La robótica suele enfrentarse a altas barreras de financiación, baja liquidez y centralización del capital. Los mercados de capital on-chain ofrecen un marco de colaboración más abierto.
¿Qué papel desempeña DEUS en RCM?
DEUS es el token de gobernanza de XMAQUINA, utilizado para la votación DAO, la gestión de tesorería y la coordinación de recursos del ecosistema.
¿Qué es la IA física?
La IA física se refiere a los sistemas de IA capaces de interactuar con el mundo físico, incluidos robots, dispositivos autónomos y máquinas automatizadas.
¿Pertenece RCM a DePIN?
RCM y DePIN comparten algunos puntos en común, pero RCM se centra más en los mercados de capital robóticos y la gobernanza de la economía de máquinas, mientras que DePIN hace hincapié en las redes de infraestructura.