Alors que la technologie IA quitte le domaine numérique pour investir le monde physique, les robots, les dispositifs autonomes et les systèmes automatisés deviennent des piliers de l'infrastructure IA de nouvelle génération. De la robotique humanoïde aux machines autonomes, un nombre croissant de systèmes IA disposent désormais de capacités d'exécution dans le monde réel, attirant ainsi davantage d'attention en matière de capitaux et de technologie vers l'économie robotique.
Pourtant, l'industrie robotique traditionnelle souffre depuis longtemps de barrières de financement élevées, d'une centralisation des capitaux et d'une faible liquidité. Les équipements robotiques représentent généralement une activité à forte intensité capitalistique, avec des cycles de R&D longs et des coûts de déploiement élevés, ce qui empêche les utilisateurs ordinaires de bénéficier directement de la croissance du secteur. RCM a été conçu pour relever ce défi en s'appuyant sur l'infrastructure Web3.
Que sont les Robotics Capital Markets ?
Proposé par XMAQUINA en tant que mécanisme de coordination du capital on-chain pour l'économie robotique, les Robotics Capital Markets (RCM) visent à gouverner, financer et allouer des ressources aux actifs robotiques et aux infrastructures automatisées au sein d'un réseau ouvert.
Alors que les marchés de capitaux traditionnels traitent des actions, des obligations et du financement des entreprises, RCM transfère une partie de la logique capitalistique de l'industrie robotique vers un environnement on-chain. Son objectif principal n'est pas simplement « d'échanger des actifs robotiques », mais plutôt de construire un nouveau cadre collaboratif autour de l'économie robotique.
RCM implique généralement :
- Équipements robotiques
- Infrastructures automatisées
- Machines autonomes
- Systèmes matériels pilotés par IA
- Réseaux d'IA physique
- Structures de trésorerie et de gouvernance liées aux robots
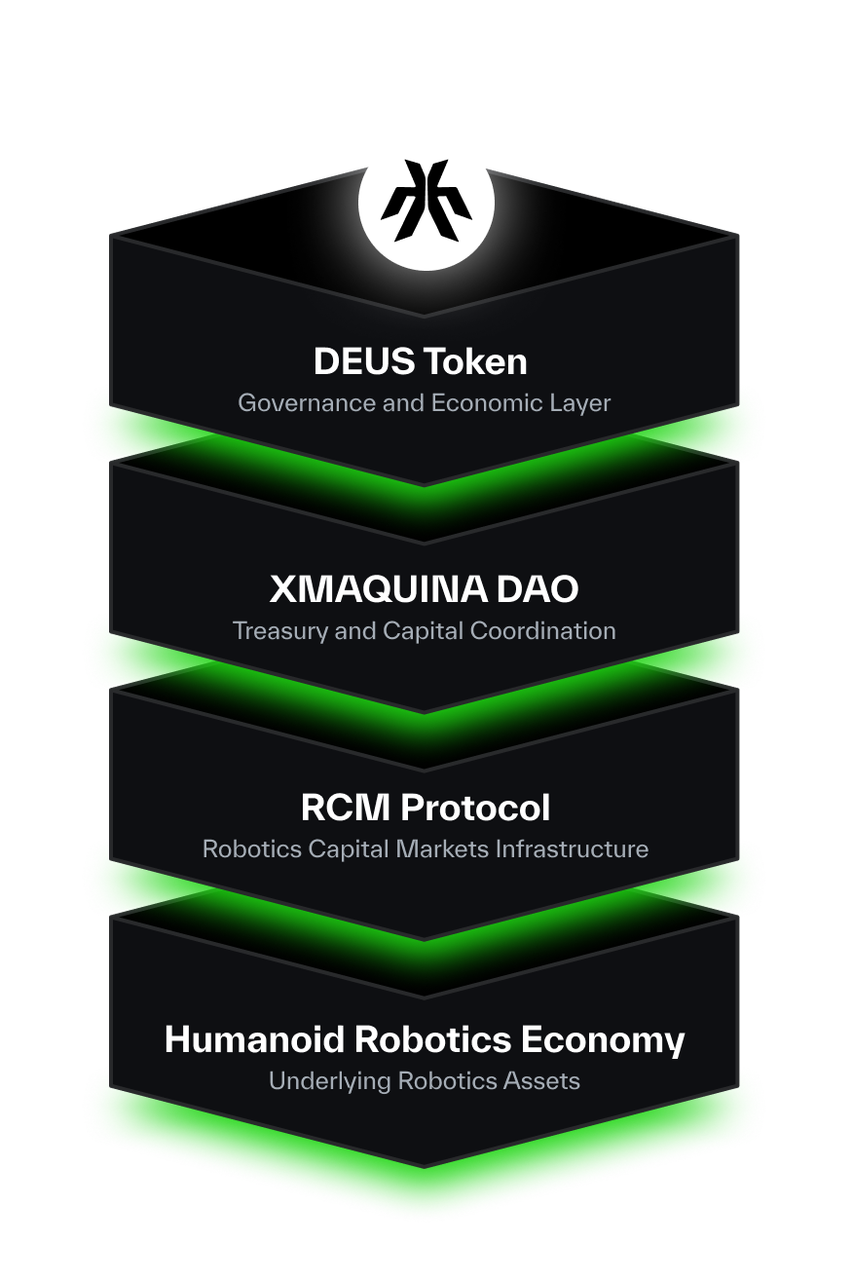
Au sein de l'écosystème XMAQUINA, RCM agit comme un module essentiel reliant la gouvernance DAO, les actifs robotiques et le capital on-chain.
Pourquoi l'industrie robotique a-t-elle besoin de marchés de capitaux on-chain ?
Contrairement au secteur Internet traditionnel, l'industrie robotique nécessite des investissements matériels considérables et des capitaux à long terme pour la R&D et les opérations.
Par exemple :
- Les robots humanoïdes exigent une fabrication matérielle complexe
- Les systèmes automatisés nécessitent une maintenance continue
- La robotique IA implique des coûts élevés de taux de hachage et d'équipement
- Les machines autonomes requièrent des mises à niveau et un déploiement continus
L'industrie robotique traditionnelle repose généralement sur le capital-risque, le financement d'entreprise et le capital institutionnel, mais ce modèle présente plusieurs inconvénients manifestes :
| Problème |
Impact |
| Barrières de financement élevées |
Les utilisateurs ordinaires ne peuvent pas participer facilement |
| Faible liquidité |
Les actifs robotiques sont difficiles à échanger |
| Centralisation du capital |
Le pouvoir de décision repose sur quelques institutions |
| Efficacité de collaboration limitée |
Les écosystèmes ouverts peinent à se former |
RCM résout ces problèmes en utilisant la gouvernance on-chain et la coordination DAO pour abaisser les seuils de participation et construire une structure de capital plus ouverte pour l'économie robotique.
L'arrivée des actifs robotiques sur la chaîne va bien au-delà de la simple « émission de tokens ». Elle exploite la gouvernance on-chain, le mappage d'actifs et la coordination du capital pour permettre à des ressources partielles de l'économie robotique de collaborer au sein du réseau Web3.
RCM se compose généralement de plusieurs composants clés :
Structure de gouvernance DAO
La DAO coordonne la gouvernance et la prise de décision dans l'économie robotique, y compris la gestion de la trésorerie, les mises à niveau des protocoles et le déploiement des ressources.
Dans XMAQUINA, DEUS et xDEUS sont utilisés pour la gouvernance et le vote.
Mécanisme de coordination des actifs
Étant donné que les actifs robotiques possèdent souvent des attributs du monde réel, des protocoles on-chain sont nécessaires pour établir une logique de gouvernance et de coordination.
Ce processus peut inclure :
- Mappage d'actifs
- Coordination des rendements
- Gestion de trésorerie
- Déploiement de capital
- Collaboration SubDAO
Mécanisme de financement on-chain
RCM vise à créer un nouveau modèle de financement pour l'économie robotique grâce à la gouvernance communautaire et à une structure de capital ouverte.
Par rapport au financement privé traditionnel, la gouvernance on-chain met l'accent sur la participation communautaire et la collaboration transparente.
Infrastructure IA physique
RCM ne traite pas uniquement des aspects financiers, mais également de l'infrastructure robotique et IA sous-jacente.
En quoi RCM diffère-t-il du RWA traditionnel ?
RCM partage certaines similitudes avec les Real World Assets (RWA), car les deux impliquent la combinaison de ressources du monde réel avec des structures on-chain.
Cependant, leurs objectifs diffèrent considérablement :
| Dimension |
RCM |
RWA traditionnel |
| Objet central |
Robots et IA physique |
Immobilier, obligations, etc. |
| Modèle de gouvernance |
Piloté par DAO |
Mappage d'actifs financiers |
| Attribut d'actif |
Infrastructure dynamique |
Actifs financiers statiques |
| Objectif |
Collaboration dans l'économie des machines |
Liquidité des actifs financiers |
| Structure réseau |
Réseaux autonomes |
Structure de produits financiers |
Le RWA traditionnel met l'accent sur la représentation on-chain des actifs financiers, tandis que RCM met l'accent sur la collaboration, la gouvernance et l'expansion de l'infrastructure au sein de l'économie robotique.
En quoi RCM diffère-t-il des modèles de financement robotique traditionnels ?
L'industrie robotique traditionnelle repose sur le financement par actions, l'investissement en capital-risque ou le capital d'entreprise.
RCM tente d'établir une logique de collaboration différente via les DAO et les structures de capital on-chain.
Les principales différences incluent :
| Dimension |
RCM |
Financement robotique traditionnel |
| Méthode de participation |
Gouvernance DAO |
Investissement institutionnel |
| Structure de capital |
Réseau on-chain ouvert |
Capital privé |
| Liquidité |
Plus élevée |
Plus faible |
| Méthode de gouvernance |
Collaboration communautaire |
Prise de décision d'entreprise |
| Accessibilité |
Plus ouverte |
Barrière à l'entrée plus élevée |
Ce modèle ne remplace pas le financement traditionnel, mais explore de nouvelles méthodes de coordination du capital au sein de l'économie robotique.
Quel rôle DEUS joue-t-il dans RCM ?
DEUS est le token de gouvernance de l'écosystème XMAQUINA et un outil de coordination clé au sein de la structure RCM.
Ses principales fonctions incluent :
- Gouvernance DAO
- Gestion de trésorerie
- Vote sur les propositions
- Coordination SubDAO
- Allocation des ressources de l'écosystème
Les utilisateurs peuvent staker DEUS pour obtenir xDEUS et participer à la gouvernance.
Ce mécanisme transforme RCM d'un simple marché d'actifs en un réseau de gouvernance centré sur l'économie robotique.
Quels défis potentiels RCM doit-il relever ?
Bien que RCM offre une approche novatrice pour amener l'économie robotique sur la chaîne, cette direction en est encore à ses balbutiements.
Les défis potentiels incluent :
- Valorisation complexe des actifs robotiques
- Difficulté élevée de gouvernance des actifs du monde réel
- Immaturité de l'industrie de l'IA physique
- Incertitude quant à l'efficacité de la coordination DAO
- Cadres réglementaires et de conformité encore en développement
De plus, l'industrie robotique elle-même présente des barrières techniques élevées et nécessite des investissements à long terme. Par conséquent, le développement de RCM est étroitement lié à la maturité globale du secteur de l'IA physique.
Résumé
Les Robotics Capital Markets (RCM) sont un mécanisme de marché de capitaux on-chain construit autour de l'économie robotique et de l'IA physique. Grâce aux DAO, à la tokenisation et à la gouvernance on-chain, ils créent de nouveaux modèles de financement et de collaboration pour les actifs robotiques et les infrastructures automatisées.
Par rapport au financement robotique traditionnel, RCM met l'accent sur la participation ouverte, la gouvernance communautaire et la coordination du capital on-chain. Son objectif n'est pas seulement d'améliorer la liquidité des actifs robotiques, mais aussi de conduire l'économie des machines vers une évolution en réseau ouvert.
FAQ
Quelle est la différence entre RCM et le RWA traditionnel ?
Le RWA traditionnel se concentre sur l'apport d'actifs financiers sur la chaîne, tandis que RCM se concentre sur la collaboration de gouvernance pour les actifs robotiques, l'IA physique et l'économie des machines.
Pourquoi l'industrie robotique a-t-elle besoin de marchés de capitaux on-chain ?
L'industrie robotique est souvent confrontée à des barrières de financement élevées, une faible liquidité et une centralisation du capital. Les marchés de capitaux on-chain offrent un cadre de collaboration plus ouvert.
Quel rôle DEUS joue-t-il dans RCM ?
DEUS est le token de gouvernance de XMAQUINA, utilisé pour le vote DAO, la gestion de trésorerie et la coordination des ressources de l'écosystème.
Qu'est-ce que l'IA physique ?
L'IA physique fait référence aux systèmes IA capables d'interagir avec le monde physique, y compris les robots, les dispositifs autonomes et les machines automatisées.
RCM fait-il partie de DePIN ?
RCM et DePIN partagent des points communs, mais RCM est davantage axé sur les marchés de capitaux robotiques et la gouvernance de l'économie des machines, tandis que DePIN met l'accent sur les réseaux d'infrastructure.