يتزايد الطلب على تحديد المواقع فائقة الدقة مع تقدم تقنيات القيادة الذاتية، والطائرات بدون طيار، والروبوتات، والتوأم الرقمي. ورغم أن نظام تحديد المواقع العالمي (GPS) التقليدي يلبي الاحتياجات اليومية، إلا أن أخطاءه التي تصل إلى مستوى الأمتار غالبًا ما تكون غير كافية للتطبيقات الآلية. لذا، أصبحت تقنية RTK، القادرة على تحقيق دقة سنتيمترية، بنية تحتية أساسية للأجهزة الذكية بسرعة.
في قطاع تحديد المواقع فائقة الدقة، برزت RTK كتقنية محورية في مجالات المسح، والأتمتة الزراعية، والروبوتات الصناعية، وأنظمة القيادة الذاتية. تستفيد GEODNET من نموذج بنية تحتية لامركزي لتوسيع نطاق خدمات RTK من الشبكات الإقليمية إلى نطاق عالمي، مما يوفر تحديد المواقع فائق الدقة لمجموعة أوسع من الأجهزة والمطورين.
ما هي تقنية تحديد المواقع RTK؟
RTK (الحركية في الوقت الفعلي) هي تقنية تحقق تحديد المواقع فائق الدقة عبر قياس الموجة الحاملة لإشارات الملاحة الفضائية.
عادةً، تحسب أجهزة استقبال GNSS القياسية الموقع مباشرة من إشارات البث الفضائي، وتكون دقتها في حدود أمتار قليلة. لكن تقنية RTK تُضيف محطة أساسية ثابتة تحسب الأخطاء آنيًا وترسل بيانات التصحيح إلى الأجهزة المتنقلة، مما يُحسّن دقة تحديد الموقع بشكل كبير.
بتقليل خطأ تحديد الموقع من مستوى الأمتار إلى مستوى السنتيمترات، تُستخدم RTK على نطاق واسع في التطبيقات التي تتطلب ملاحة ومسحًا فائقي الدقة.
لماذا يُنتج نظام GPS القياسي أخطاء في تحديد الموقع؟
تنشأ أخطاء تحديد الموقع في نظام GPS القياسي من تضافر عدة عوامل.
أخطاء مدار القمر الصناعي
قد تتعرض الأقمار الصناعية لانحرافات مدارية أثناء التشغيل، مما يُسبب عدم دقة في حساب الموقع.
تأخيرات الغلاف الأيوني والتروبوسفير
تتأثر إشارات الأقمار الصناعية بالغلاف الأيوني والتروبوسفير أثناء عبورها الغلاف الجوي، مما يُغير سرعة انتشارها.
تأثير المسارات المتعددة
قد تنعكس الإشارات عن المباني أو الجبال أو الأرض قبل وصولها إلى جهاز الاستقبال، مما يُبعد القياسات عن الموقع الحقيقي.
أخطاء جهاز الاستقبال
تؤثر الاختلافات في أداء الأجهزة وقدرات الخوارزميات بين الأجهزة المختلفة على نتيجة تحديد الموقع النهائية.
يحافظ تراكم هذه الأخطاء عادةً على دقة نظام GPS القياسي ضمن نطاق يصل إلى عدة أمتار.
كيف تحقق RTK تحديد الموقع على مستوى السنتيمتر؟
يكمن جوهر RTK في استخدام محطة أساسية لتوفير تصحيحات فورية للأخطاء.
تُثبَّت المحطة الأساسية عند إحداثيات معروفة بدقة، مما يسمح لها بحساب الفرق بين إشارات الأقمار الصناعية المستلمة وقيمها النظرية بدقة. تُحوَّل هذه الفروقات إلى بيانات تصحيح وتُرسَل عبر شبكة إلى الأجهزة المتنقلة القريبة. أثناء استقبال إشارات الأقمار الصناعية، يتلقى الجهاز المتنقل بيانات التصحيح هذه أيضًا، مما يُلغي معظم الأخطاء ويُحقق دقة سنتيمترية.
تُنجز هذه العملية عادةً في غضون ثوانٍ، ومن هنا جاء اسم "الحركية في الوقت الفعلي".
ما الفرق بين GNSS و GPS و RTK؟
يخلط العديد من المستخدمين بين GNSS و GPS و RTK، لكن هذه المصطلحات تعمل على مستويات مفاهيمية مختلفة.
GNSS هو النظام العالمي للملاحة عبر الأقمار الصناعية
GNSS (النظام العالمي للملاحة عبر الأقمار الصناعية) هو المصطلح الجامع لجميع أنظمة الملاحة الفضائية العالمية.
تشمل الأنظمة الرئيسية حاليًا:
- GPS (الولايات المتحدة)
- GLONASS (روسيا)
- Galileo (الاتحاد الأوروبي)
- BeiDou (الصين)
GPS هو أحد مكونات GNSS
GPS هو أحد أقدم أنظمة الملاحة الفضائية وأكثرها استخدامًا.
في الاستخدام اليومي، يشير مصطلح "الملاحة عبر GPS" عادةً إلى الأجهزة التي تستقبل إشارات من أنظمة GNSS متعددة.
RTK هي تقنية تحديد مواقع فائقة الدقة
RTK ليست نظامًا فضائيًا، بل هي طريقة تحديد موقع تُصحح الأخطاء بناءً على إشارات GNSS.
وعليه، فإن الفرق هو: GNSS يوفر إشارات الأقمار الصناعية؛ GPS هو أحد أنظمة GNSS هذه؛ تستخدم RTK تلك الإشارات لتحقيق تحديد الموقع على مستوى السنتيمتر.
ما المكونات التي تتكون منها شبكة RTK؟
يتكون نظام RTK الكامل عادةً من عدة مكونات تعمل معًا بتناغم.
المحطة الأساسية
تستقبل المحطة الأساسية إشارات الأقمار الصناعية باستمرار وتحسب الأخطاء.
خادم بيانات التصحيح
يعالج الخادم بيانات المحطة الأساسية ويُولّد معلومات تصحيح موحدة.
شبكة الاتصالات
تنقل شبكة الإنترنت أو نظام الاتصالات اللاسلكية بيانات التصحيح إلى الأجهزة الطرفية.
الجهاز الطرفي المتنقل
الجهاز الطرفي المتنقل هو الجهاز الذي يستخدم خدمة تحديد الموقع، مثل طائرة بدون طيار، أو روبوت، أو مركبة ذاتية القيادة.
تشكل هذه المكونات معًا بنية خدمة تحديد المواقع RTK.
كيف تبني GEODNET شبكة RTK لامركزية؟
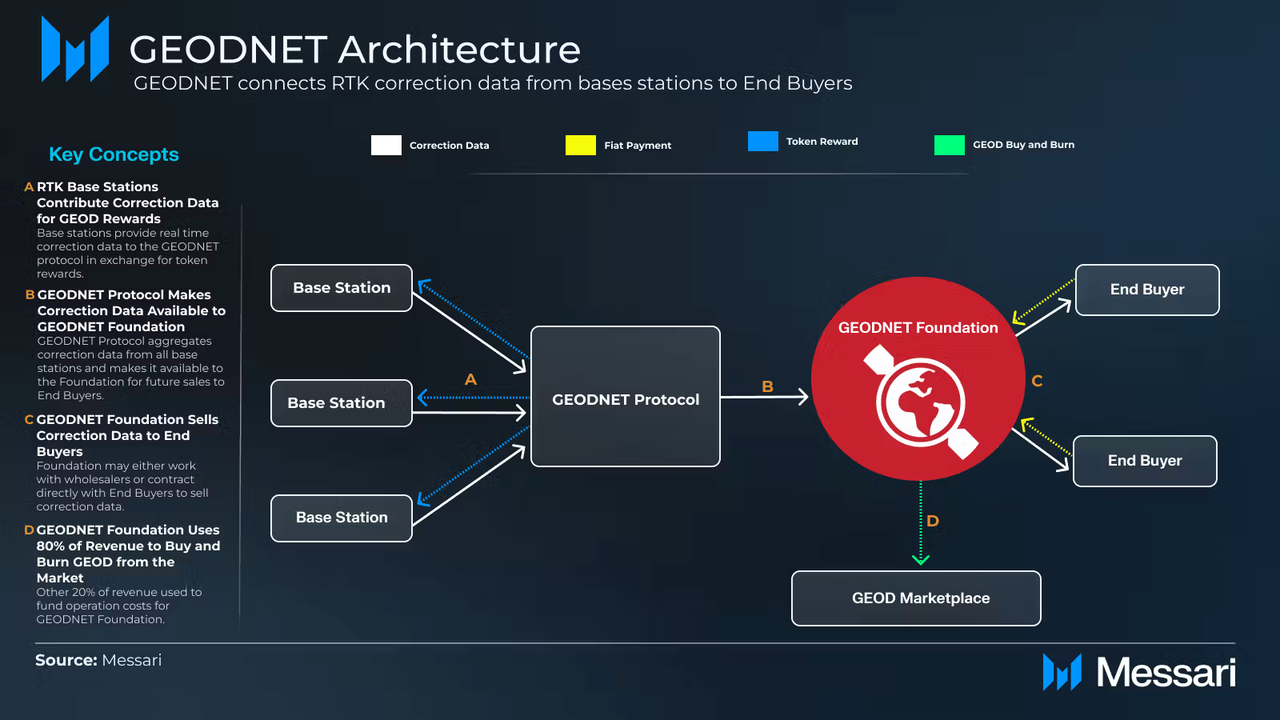
تدمج GEODNET شبكات RTK التقليدية مع نموذج DePIN لإنشاء بنية تحتية عالمية لتحديد المواقع فائق الدقة. بدلاً من الاعتماد على مشغلين مركزيين لبناء المحطات الأساسية، تسمح GEODNET للمستخدمين حول العالم بنشر محطات GNSS أساسية وربطها بالشبكة. يحصل مشغلو العُقد على مكافآت من رمز GEOD مقابل توفير بيانات تحديد مواقع عالية الجودة، مما يُغذي النمو المستمر للشبكة.
يُخفّض هذا النموذج تكاليف البنية التحتية مع تحسين التغطية وكفاءة التوسع. ومع انضمام المزيد من العُقد، تستطيع GEODNET تقديم خدمات تحديد المواقع فائقة الدقة لعدد متزايد من المناطق.
كيف تعمل عملية تحديد موقع RTK واحدة على GEODNET؟
يبدأ فهم GEODNET بمتابعة سير عمل كامل لتحديد الموقع.
الخطوة 1: المحطة الأساسية تستقبل إشارات الأقمار الصناعية
تستقبل عُقد GEODNET باستمرار إشارات من أنظمة GNSS متعددة.
الخطوة 2: حساب الخطأ في الوقت الفعلي
تحسب المحطة الأساسية خطأ إشارة القمر الصناعي الحالي بناءً على إحداثياتها المعروفة.
الخطوة 3: توليد بيانات التصحيح
يُحوِّل النظام الخطأ إلى معلومات تصحيح RTK قياسية.
الخطوة 4: الإرسال إلى الجهاز الطرفي
تُنقل بيانات التصحيح عبر الإنترنت إلى الطائرات بدون طيار، أو الروبوتات، أو المركبات.
الخطوة 5: الجهاز الطرفي يُكمل تصحيح تحديد الموقع
يستخدم الجهاز بيانات التصحيح لمعايرة إشارات الأقمار الصناعية، محققًا تحديد الموقع على مستوى السنتيمتر.
تعمل هذه العملية بأكملها بشكل مستمر في الوقت الفعلي.
ما الصناعات التي تستخدم تقنية RTK بشكل أساسي؟
أصبح تحديد المواقع فائق الدقة بنية تحتية حاسمة للتحول الرقمي في العديد من الصناعات.
القيادة الذاتية
تعتمد المركبات ذاتية القيادة على تحديد الموقع على مستوى السنتيمتر لتخطيط المسار واكتشاف المسارب.
المسح بالطائرات بدون طيار
تستخدم طائرات المسح بدون طيار تقنية RTK لتحسين دقة الخرائط والنماذج ثلاثية الأبعاد.
الزراعة الذكية
تعتمد الجرارات ذاتية القيادة ومعدات البذر الدقيقة على الملاحة فائقة الدقة للعمليات الميدانية.
الروبوتات الصناعية
تتطلب الروبوتات المتنقلة ذاتية القيادة تحديد مواقع دقيق للتحكم في المسار والمهام التعاونية.
الحوسبة المكانية
تحتاج أنظمة الواقع المعزز والتوأم الرقمي إلى بيانات موقع دقيقة لبناء نماذج مكانية واقعية.
ما التحديات التي تواجهها تقنية RTK؟
على الرغم من دقتها العالية، لا تزال RTK تواجه قيودًا عملية.
أولاً، تؤثر كثافة المحطات الأساسية بشكل مباشر على أداء تحديد الموقع. ثانيًا، يمكن أن يؤثر زمن انتقال اتصالات الشبكة على توقيت بيانات التصحيح. بالإضافة إلى ذلك، لا تزال العوائق وتأثير المسارات المتعددة في البيئات الحضرية المعقدة قد تُضعف جودة تحديد الموقع. مع تقدم تقنية GNSS متعددة الترددات وتوسع شبكات المحطات الأساسية العالمية، تُحل هذه المشكلات تدريجيًا.
الخاتمة
تُعد RTK واحدة من أكثر تقنيات تحديد المواقع فائقة الدقة انتشارًا اليوم. من خلال تصحيح أخطاء إشارات الأقمار الصناعية في الوقت الفعلي، ترفع دقة GNSS القياسية من مستوى الأمتار إلى مستوى السنتيمترات. جعل نمو القيادة الذاتية والطائرات بدون طيار والروبوتات والزراعة الذكية من RTK أساسًا لا غنى عنه للأجهزة الذكية في العالم الحقيقي.
تجمع GEODNET بين تقنية RTK ونموذج DePIN، وتقدم خدمات تحديد المواقع فائقة الدقة عبر شبكة محطات أساسية موزعة عالميًا. على عكس شبكات RTK المركزية التقليدية، تستخدم GEODNET نهجًا مجتمعيًا لتوسيع تغطية البنية التحتية، مما يجعل تحديد المواقع فائق الدقة متاحًا في نطاق أوسع من التطبيقات.
الأسئلة الشائعة
ما هي تقنية تحديد المواقع RTK؟
RTK (الحركية في الوقت الفعلي) هي تقنية ملاحة فائقة الدقة تستخدم محطة أساسية لتصحيح أخطاء إشارات الأقمار الصناعية في الوقت الفعلي، محققة دقة تحديد موقع على مستوى السنتيمتر.
ما الفرق بين RTK و GPS؟
GPS هو نظام ملاحة فضائي، بينما RTK هي تقنية تحديد موقع تستخدم GPS وإشارات GNSS أخرى لتصحيح الأخطاء. دقة GPS القياسية عادةً ما تكون في حدود أمتار قليلة؛ بينما تحقق RTK دقة على مستوى السنتيمتر.
لماذا RTK أكثر دقة من GPS القياسي؟
تستخدم RTK محطة أساسية لحساب ونقل تصحيحات الأخطاء في الوقت الفعلي، مما يُلغي مصادر الأخطاء الرئيسية مثل أخطاء مدار القمر الصناعي وتأخيرات الغلاف الجوي، مما يُؤدي إلى دقة أعلى بشكل ملحوظ.
ما تقنية تحديد المواقع التي تستخدمها GEODNET؟
تعتمد GEODNET بشكل أساسي على تقنيتي GNSS و RTK، وتوفر تصحيحات تحديد المواقع في الوقت الفعلي عبر شبكة عالمية من المحطات الأساسية لتحقيق ملاحة على مستوى السنتيمتر.
ما الفرق بين GEODNET وشبكات RTK التقليدية؟
تعتمد GEODNET نموذج DePIN، حيث يقوم مجتمع عالمي بنشر المحطات الأساسية بشكل مشترك ويتلقى حوافز رمزية، بينما تُبنى شبكات RTK التقليدية وتُدار بشكل مركزي من قبل جهات حكومية أو مشغلين تجاريين.
ما الأجهزة التي تحتاج إلى تحديد مواقع RTK؟
الطائرات بدون طيار، والمركبات ذاتية القيادة، والآلات الزراعية، والروبوتات الصناعية، ومعدات المسح، وبعض أطراف الحوسبة المكانية والواقع المعزز تحتاج جميعها إلى قدرات تحديد المواقع فائقة الدقة التي توفرها RTK.