À medida que a tecnologia de IA transita do domínio digital para o mundo físico, robôs, dispositivos autónomos e sistemas automatizados tornam-se componentes essenciais da infraestrutura de IA de próxima geração. Desde a robótica humanóide até às máquinas autónomas, um número crescente de sistemas de IA possui agora capacidades de execução no mundo físico, atraindo maior atenção de capital e tecnológica para a economia robótica.
Contudo, a indústria tradicional da robótica tem sido há muito afetada por barreiras de financiamento elevadas, centralização do capital e baixa liquidez. O equipamento robótico é tipicamente um negócio de ativos pesados, com ciclos de I&D prolongados e custos de implantação elevados, dificultando aos utilizadores comuns beneficiar diretamente do crescimento do setor. O RCM foi concebido para responder a este desafio, alavancando a infraestrutura Web3.
O que são os mercados de capitais de robótica
Proposto pela XMAQUINA como mecanismo de coordenação de capital on-chain para a economia robótica, os Robotics Capital Markets (RCM) visam governar, financiar e alocar recursos para ativos robóticos e infraestrutura automatizada numa rede aberta.
Enquanto os mercados de capitais tradicionais servem ações, obrigações e financiamento empresarial, o RCM desloca lógicas de capital seletivas da indústria da robótica para um ambiente on-chain. O seu propósito central não é simplesmente "negociar ativos robóticos", mas sim construir uma nova estrutura de colaboração em torno da economia robótica.
O RCM envolve tipicamente:
- Equipamento robótico
- Infraestrutura automatizada
- Máquinas autónomas
- Sistemas de hardware orientados por IA
- Redes de IA física
- Estruturas de tesouraria e governação relacionadas com robôs
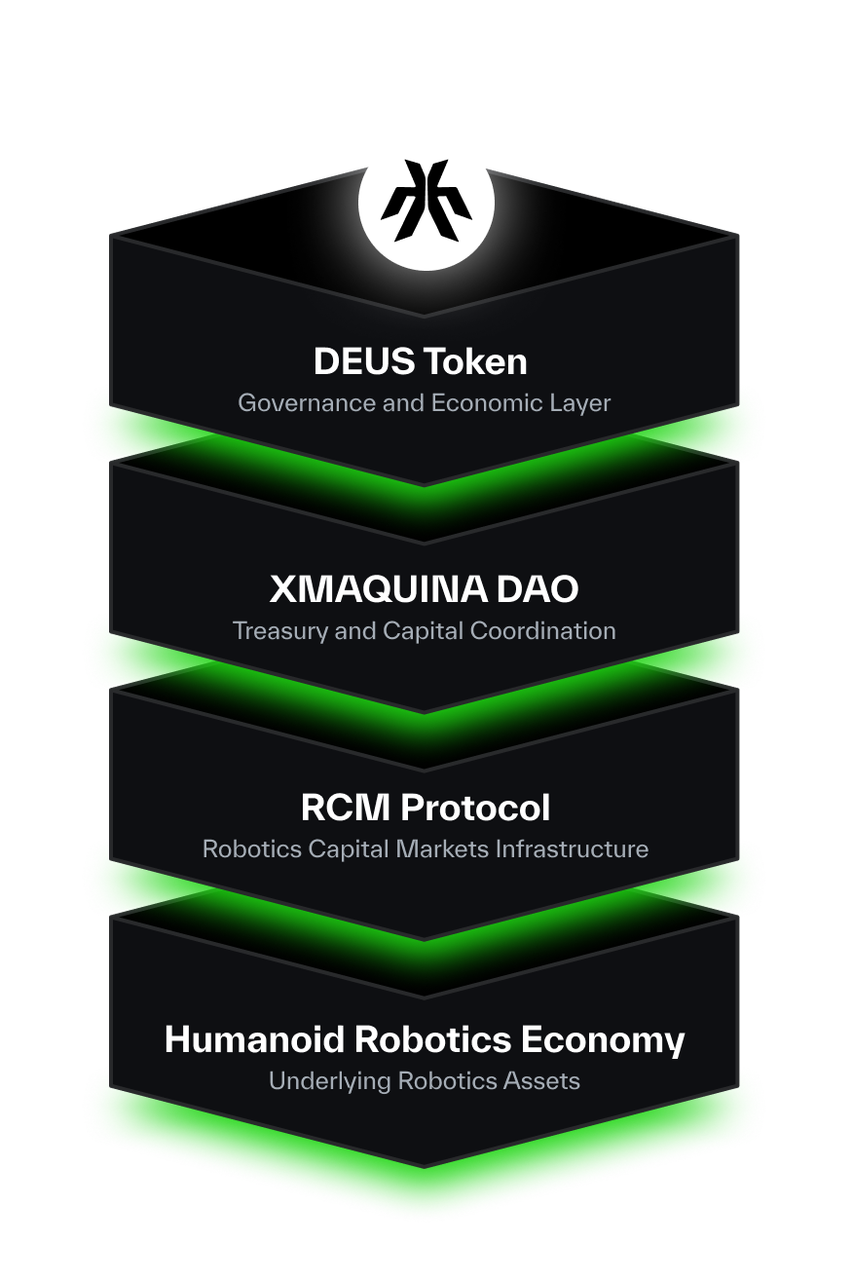
No ecossistema da XMAQUINA, o RCM atua como um módulo crítico que liga a governança DAO, os ativos robóticos e o capital on-chain.
Por que a indústria da robótica precisa de mercados de capitais on-chain
Ao contrário do setor tradicional da Internet, a indústria da robótica exige investimento substancial em hardware e capital de longo prazo para I&D e operações.
Por exemplo:
- Robôs humanóides requerem fabrico de hardware complexo
- Sistemas automatizados necessitam de manutenção contínua
- A robótica de IA envolve custos elevados de hashrate e equipamento
- Máquinas autónomas requerem atualizações e implementação contínuas
A indústria tradicional da robótica depende tipicamente de capital de risco, financiamento empresarial e capital institucional; no entanto, este modelo apresenta várias desvantagens claras:
| Problema |
Impacto |
| Barreiras de financiamento elevadas |
Os utilizadores comuns não conseguem participar facilmente |
| Baixa liquidez |
Os ativos robóticos são difíceis de negociar |
| Centralização do capital |
O poder de decisão reside em poucas instituições |
| Eficiência de colaboração limitada |
Os ecossistemas abertos têm dificuldade em formar-se |
O RCM aborda estes problemas ao recorrer à governação on-chain e à coordenação DAO para reduzir os limiares de participação e construir uma estrutura de capital mais aberta para a economia robótica.
Como o RCM traz os ativos robóticos para on-chain
Trazer ativos robóticos para on-chain vai além da simples "emissão de tokens". Recorre à governação on-chain, ao mapeamento de ativos e à coordenação de capital para permitir que recursos parciais da economia robótica colaborem na rede Web3.
O RCM consiste tipicamente em vários componentes principais:
Estrutura de governança DAO
A DAO coordena a governação e a tomada de decisões na economia robótica, incluindo a gestão da tesouraria, atualizações de protocolo e implementação de recursos.
Na XMAQUINA, o DEUS e o xDEUS são utilizados para governação e votação.
Mecanismo de coordenação de ativos
Visto que os ativos robóticos têm frequentemente atributos do mundo real, são necessários protocolos on-chain para estabelecer a lógica de governação e coordenação.
Este processo pode incluir:
- Mapeamento de ativos
- Coordenação de rendimento
- Gestão da tesouraria
- Implementação de capital
- Colaboração subDAO
Mecanismo de financiamento on-chain
O RCM procura criar um novo modelo de financiamento para a economia robótica através da governação comunitária e de uma estrutura de capital aberta.
Em comparação com o financiamento privado tradicional, a governação on-chain enfatiza a participação comunitária e a colaboração transparente.
Infraestrutura de IA física
O RCM aborda não apenas os aspetos financeiros, mas também a infraestrutura subjacente de robôs e IA.
Como o RCM difere do RWA tradicional
O RCM partilha algumas semelhanças com os Real World Assets (RWA), uma vez que ambos combinam recursos do mundo real com estruturas on-chain.
No entanto, os seus focos diferem significativamente:
| Dimensão |
RCM |
RWA tradicional |
| Objeto principal |
Robôs e IA física |
Imobiliário, obrigações, etc. |
| Modelo de governação |
Orientado por DAO |
Mapeamento de ativos financeiros |
| Atributo do ativo |
Infraestrutura dinâmica |
Ativos financeiros estáticos |
| Objetivo |
Colaboração na economia das máquinas |
Liquidez de ativos financeiros |
| Estrutura de rede |
Redes autónomas |
Estrutura de produtos financeiros |
O RWA tradicional enfatiza a representação on-chain de ativos financeiros, ao passo que o RCM realça a colaboração, a governação e a expansão da infraestrutura na economia robótica.
Como o RCM difere dos modelos tradicionais de financiamento de robótica
A indústria tradicional da robótica depende de financiamento de capital próprio, investimento de capital de risco ou capital empresarial.
O RCM tenta estabelecer uma lógica de colaboração diferente através de DAO e estruturas de capital on-chain.
As principais diferenças incluem:
| Dimensão |
RCM |
Financiamento tradicional de robótica |
| Método de participação |
Governança DAO |
Investimento institucional |
| Estrutura de capital |
Rede on-chain aberta |
Capital privado |
| Liquidez |
Mais elevada |
Mais baixa |
| Método de governação |
Colaboração comunitária |
Tomada de decisão empresarial |
| Acessibilidade |
Mais aberta |
Barreira de entrada mais elevada |
Este modelo não substitui o financiamento tradicional, mas explora novos métodos de coordenação de capital na economia robótica.
Qual o papel do DEUS no RCM?
O DEUS é o token de governação do ecossistema XMAQUINA e uma ferramenta de coordenação chave na estrutura do RCM.
As suas principais funções incluem:
- Governança DAO
- Gestão da tesouraria
- Votação de propostas
- Coordenação subDAO
- Alocação de recursos do ecossistema
Os utilizadores podem fazer staking de DEUS para obter xDEUS e participar na governação.
Este mecanismo transforma o RCM de um simples mercado de ativos numa rede de governação centrada na economia robótica.
Que desafios potenciais enfrenta o RCM?
Embora o RCM ofereça uma abordagem inovadora para trazer a economia robótica para on-chain, esta direção permanece numa fase inicial.
Os desafios potenciais incluem:
- Avaliação complexa dos ativos robóticos
- Elevada dificuldade na governação de ativos do mundo real
- Imaturidade da indústria de IA física
- Incerteza na eficiência da coordenação DAO
- Quadros regulatórios e de conformidade ainda em desenvolvimento
Além disso, a própria indústria da robótica apresenta barreiras técnicas elevadas e requer investimento de longo prazo. Por conseguinte, o desenvolvimento do RCM está intimamente ligado à maturidade global do setor de IA física.
Resumo
Os Robotics Capital Markets (RCM) são um mecanismo de mercado de capitais on-chain construído em torno da economia robótica e da IA física. Através de DAO, tokenização e governação on-chain, criam novos modelos de financiamento e colaboração para ativos robóticos e infraestrutura automatizada.
Em comparação com o financiamento tradicional de robótica, o RCM enfatiza a participação aberta, a governação comunitária e a coordenação de capital on-chain. O seu objetivo não é apenas melhorar a liquidez dos ativos robóticos, mas também conduzir a economia das máquinas para uma evolução em rede aberta.
Perguntas Frequentes
Qual é a diferença entre o RCM e o RWA tradicional?
O RWA tradicional foca-se em trazer ativos financeiros para on-chain, enquanto o RCM se centra na colaboração de governação para ativos robóticos, IA física e a economia das máquinas.
Por que é que a indústria da robótica precisa de mercados de capitais on-chain?
A indústria da robótica enfrenta frequentemente barreiras de financiamento elevadas, baixa liquidez e centralização do capital. Os mercados de capitais on-chain oferecem uma estrutura de colaboração mais aberta.
Qual o papel do DEUS no RCM?
O DEUS é o token de governação da XMAQUINA, utilizado para votação DAO, gestão da tesouraria e coordenação de recursos do ecossistema.
O que é a IA física?
A IA física refere-se a sistemas de IA capazes de interagir com o mundo físico, incluindo robôs, dispositivos autónomos e máquinas automatizadas.
O RCM pertence ao DePIN?
O RCM e o DePIN partilham alguns pontos em comum, mas o RCM está mais focado nos mercados de capitais de robótica e na governação da economia das máquinas, enquanto o DePIN enfatiza as redes de infraestrutura.