Durante décadas, robôs eram restritos a funções altamente especializadas, dedicando-se principalmente a tarefas repetitivas em ambientes fabris estruturados. Hoje, a inteligência artificial transforma a robótica — permitindo que os robôs interpretem comandos humanos, executem instruções e se adaptem a cenários dinâmicos.
Estamos ingressando em uma nova era de rápido crescimento: segundo estimativas do Citi, 1,3 bilhão de robôs devem ser implementados no mundo até 2035, expandindo sua atuação das fábricas para residências e setores de serviços. Já a Morgan Stanley prevê que apenas o mercado de robótica humanoide pode alcançar US$ 5 trilhões até 2050.
Esse avanço acelerado revela um potencial de mercado gigantesco, mas também traz grandes desafios relacionados à centralização, confiança, privacidade e escalabilidade. Tecnologias Web3 oferecem soluções inovadoras, viabilizando redes robóticas descentralizadas, colaborativas, verificáveis e que preservam a privacidade, endereçando diretamente essas questões.
Nesta edição, exploramos a cadeia de valor da robótica com IA, com foco especial em robôs humanoides, e identificamos oportunidades relevantes advindas da convergência entre AI Robotics e tecnologias Web3.
Cadeia de Valor em Robótica de IA
A cadeia de valor da robótica de IA é formada por quatro camadas fundamentais: Hardware, Inteligência, Dados e Agente. Cada camada depende das demais, permitindo que robôs percebam, raciocinem e atuem em ambientes reais complexos.
Nos últimos anos, presenciamos avanços marcantes na camada de hardware, liderados por empresas como Unitree e Figure AI. Entretanto, persistem importantes desafios nas camadas intermediárias — sobretudo, escassez de datasets de alta qualidade, limitação de modelos fundacionais generalizáveis, interoperabilidade restrita entre diferentes morfologias robóticas e a necessidade de processamento confiável na borda. Assim, as maiores oportunidades de evolução concentram-se hoje nas camadas de Inteligência, Dados e Agente.
Hardware: “O Corpo”
Atualmente, construir e implementar “corpos robóticos” contemporâneos nunca foi tão viável. Existem mais de 100 tipos distintos de robôs humanoides no mercado, incluindo Optimus (Tesla), G1 (Unitree), Digit (Agility Robotics) e Figure 02 (Figure AI).
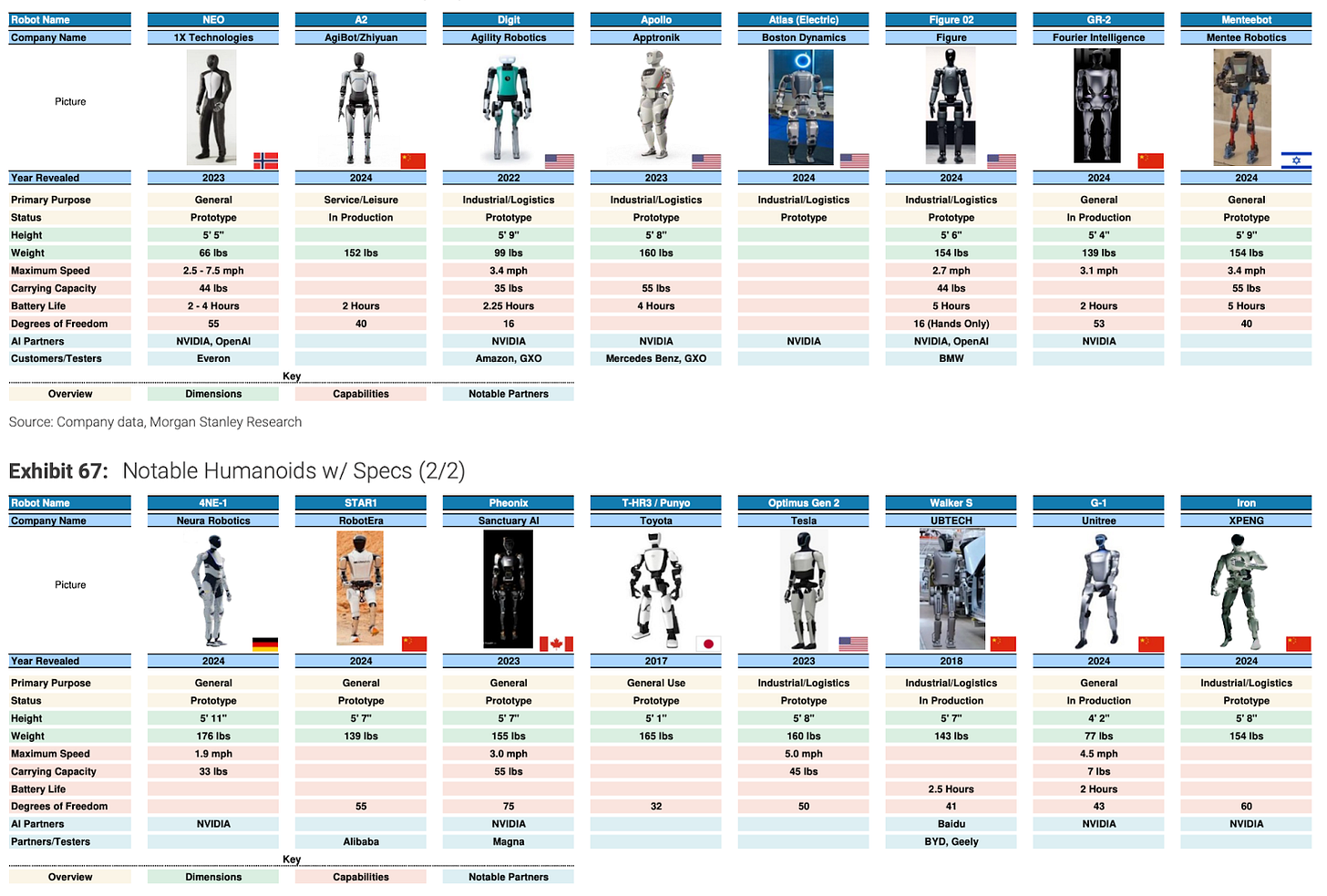
Fonte: Morgan Stanley, The Humanoid 100: Mapping the Humanoid Robot Value Chain.
Esse progresso resulta de inovações em três componentes centrais:
- Atuadores: Responsáveis pelos “músculos” dos robôs, atuadores convertem comandos digitais em movimentos precisos. O desenvolvimento de motores elétricos de alto desempenho (para ações rápidas e exatas) e Atuadores Elastoméricos Dielétricos (DEAs), voltados para tarefas delicadas, aprimorou expressivamente a destreza dos robôs. Exemplos são o Optimus Gen 2 (Tesla), com 22 graus de liberdade (DoF), e o Unitree G1, ambos demonstrando mobilidade e habilidade próximas da humana.
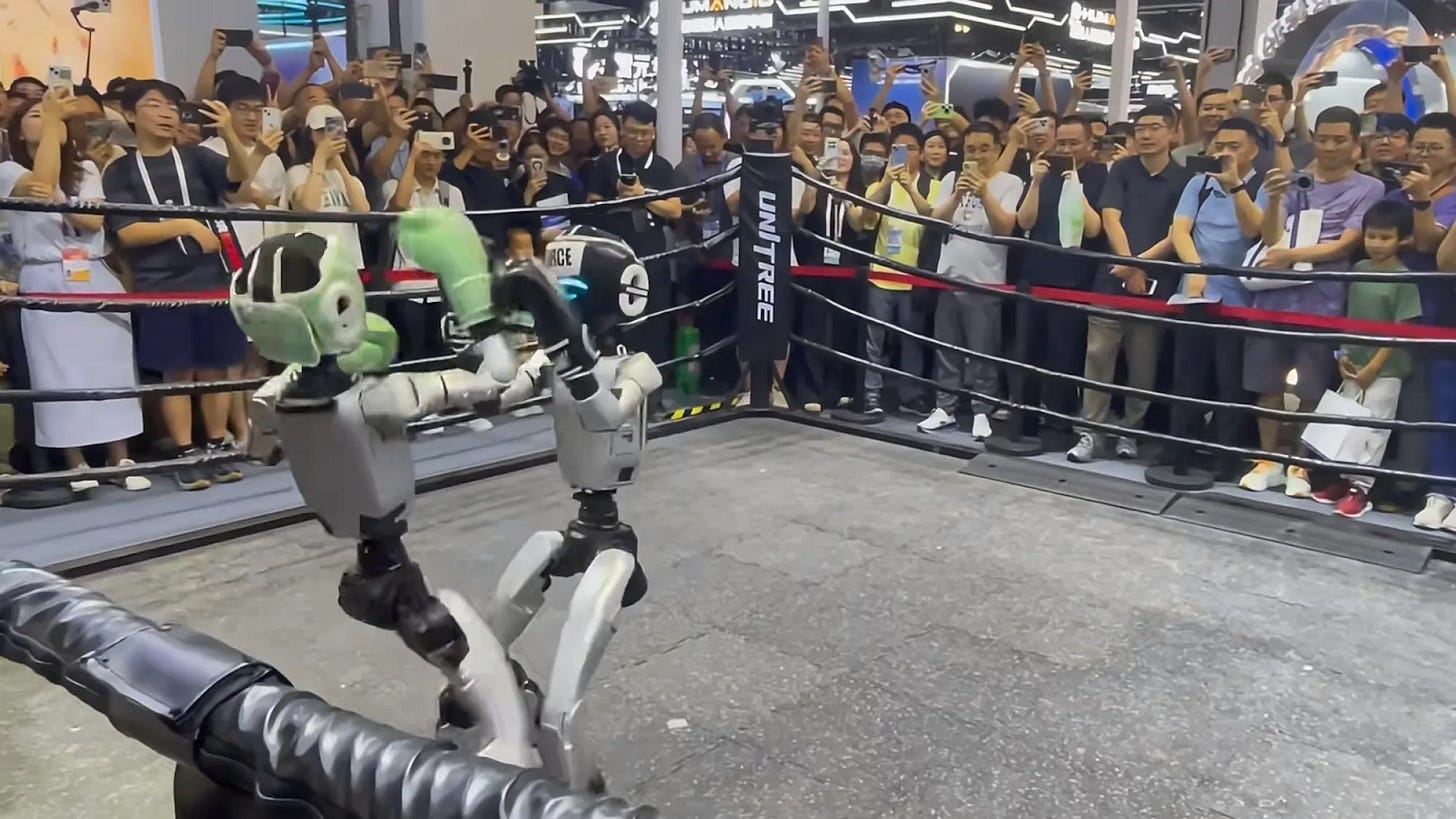
Fonte: Novos robôs humanoides da Unitree em apresentação de boxe na WAIC 2025
Sensores: Sensores avançados permitem aos robôs perceber e interpretar o ambiente por meio de visão, LIDAR/RADAR, tato e áudio. Essas tecnologias viabilizam navegação segura, manipulação precisa e maior percepção contextual.
Computação embarcada: CPUs, GPUs e aceleradores de IA (TPUs, NPUs) processam dados dos sensores em tempo real e executam modelos de IA para decisões autônomas. Conectividade rápida e confiável garante coordenação integrada, e arquiteturas híbridas edge-cloud permitem que robôs transfiram cálculos pesados conforme necessário.
Inteligência: “O Cérebro”
À medida que o hardware evolui, o foco se desloca para a criação do “cérebro robótico”: modelos fundacionais robustos e políticas de controle avançadas.
Antes da integração da IA, robôs baseavam-se em rotinas programadas e automação por regras fixas, sem inteligência adaptativa.
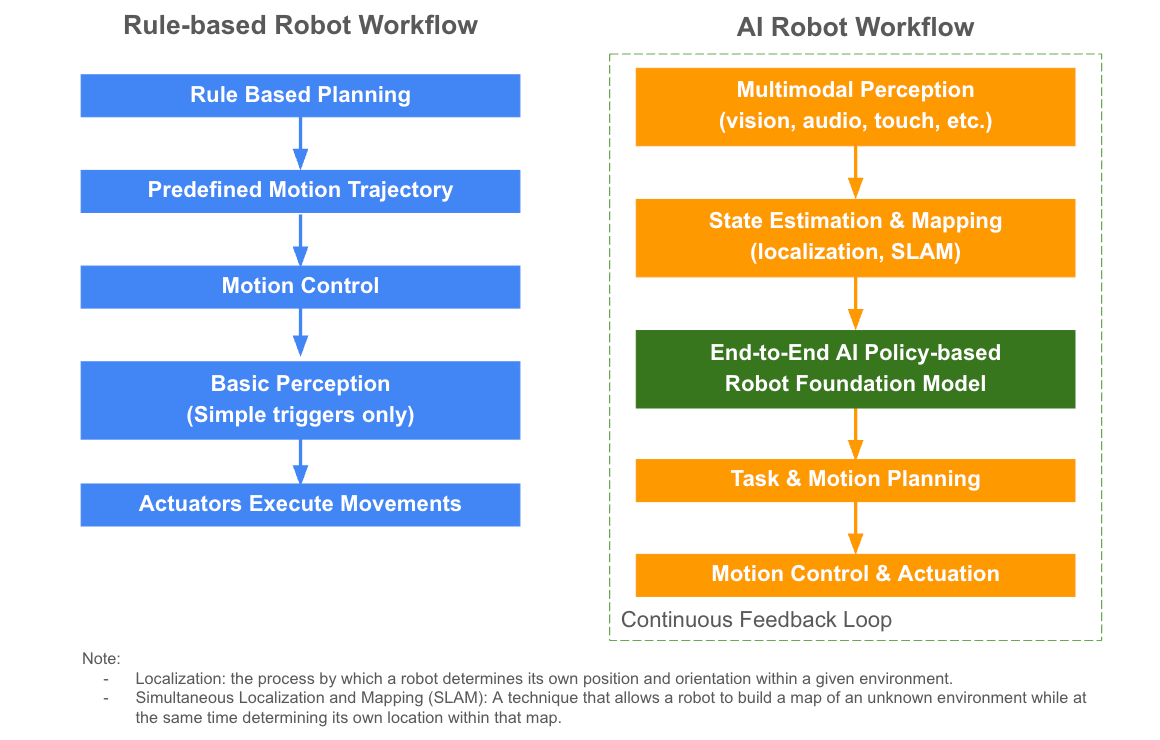
Modelos fundacionais começam agora a ser adotados na robótica. No entanto, grandes modelos de linguagem (LLMs) generalistas não bastam — robôs precisam perceber, raciocinar e agir em ambientes físicos e dinâmicos. Por isso, o setor investe em modelos robóticos de ponta a ponta, baseados em políticas. Com eles, robôs podem:
- Perceber: Absorver dados sensoriais brutos e multimodais (visão, áudio, tato)
- Planejar: Estimar seu próprio estado, mapear o ambiente e interpretar instruções complexas — conectando percepção diretamente à ação com mínima intervenção manual
Agir: Gerar planos de movimento e emitir comandos de controle para execução em tempo real
Esses modelos aprendem políticas gerais de interação com o universo físico, tornando os robôs capazes de se adaptar a variados cenários e operar com inteligência e autonomia superiores. Modelos avançados também utilizam feedback contínuo, permitindo que robôs aprendam pela experiência e se tornem ainda mais adaptativos em ambientes dinâmicos.
O principal paradigma fundacional hoje é o Vision-Language-Action Model (VLA). Modelos VLA conectam dados sensoriais — principalmente visão e instruções em linguagem natural — diretamente às ações robóticas, permitindo que o robô responda ao que “vê” e “ouve”. Exemplos incluem RT-2 (Google), Isaac GR00T N1 (NVIDIA) e π0 (Physical Intelligence).
Para aprimorar esses modelos, várias abordagens complementares são integradas, como:
Modelos de mundo: Criam simulações internas do ambiente físico para o robô aprender comportamentos complexos, prever resultados e planejar ações. A Google, por exemplo, lançou o Genie 3, modelo geral capaz de gerar ambientes interativos de alta diversidade.
- Aprendizado profundo por reforço: Ensina comportamentos por tentativa e erro.
- Teleoperação: Permite controle remoto e coleta de dados para treinamento.
Aprendizado por demonstração (LfD) / Imitation Learning: Ensina novas habilidades por imitação de ações humanas.
O gráfico abaixo ilustra como esses métodos contribuem para os modelos fundacionais robóticos.
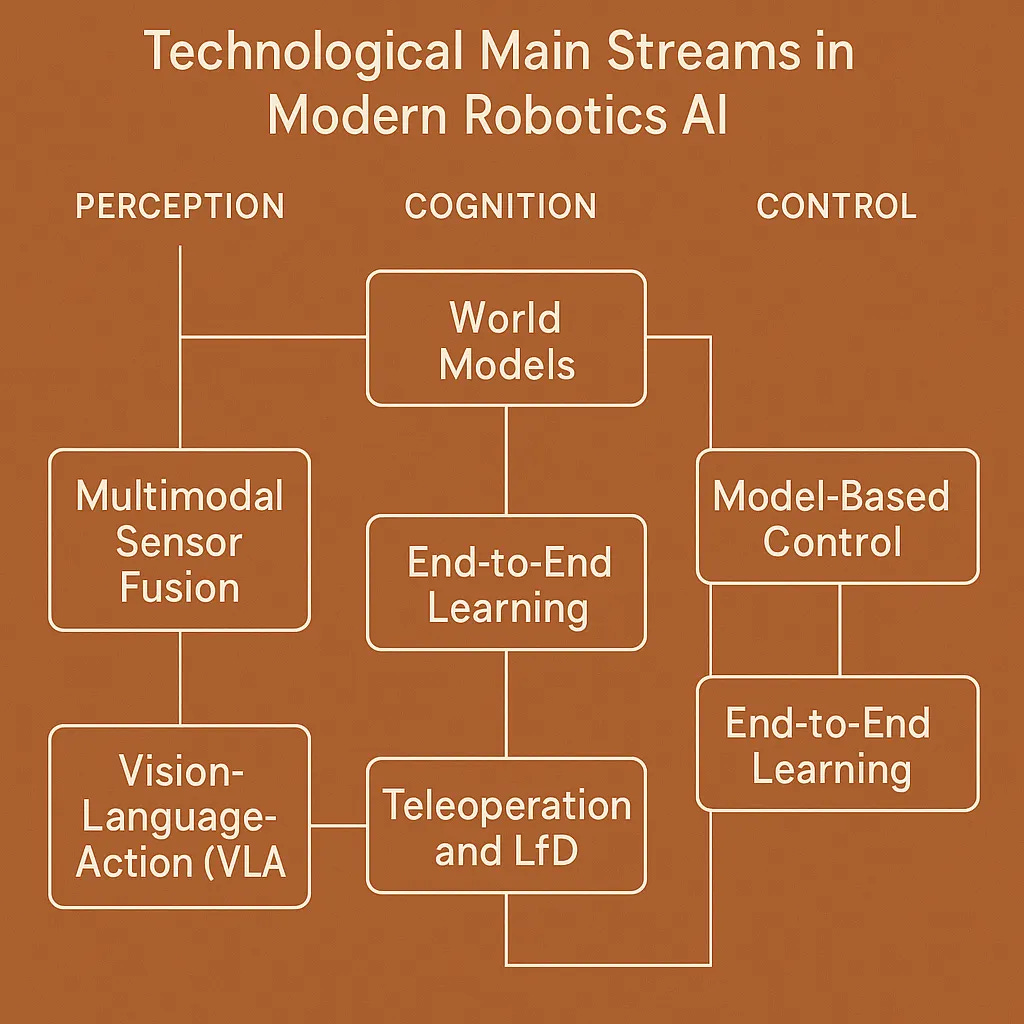
Fonte: World models: the physical intelligence core driving us toward AGI
Recentes avanços open-source — como π0 (Physical Intelligence) e Isaac GR00T N1 (NVIDIA) — representam marcos importantes. Entretanto, a maior parte dos modelos fundacionais robóticos ainda é centralizada e de código fechado. Empresas como Covariant, Tesla e outras mantêm código e datasets proprietários por falta de incentivos claros à abertura.
A ausência de transparência dificulta a colaboração e a interoperabilidade entre plataformas robóticas — evidenciando a necessidade de compartilhamento seguro de modelos, padrões em blockchain governados pela comunidade e camadas de interoperabilidade entre morfologias. Tal abordagem fomenta confiança, colaboração e progresso mais consistente.
Dados: “O Conhecimento” para o Cérebro
Datasets robustos para robótica dependem de três pilares: quantidade, qualidade e diversidade.
Apesar dos avanços, a escala dos conjuntos de dados disponíveis ainda é insuficiente. O GPT-3 da OpenAI, por exemplo, foi treinado com 300 bilhões de tokens, enquanto o maior dataset open-source de robótica — Open X-Embodiment — reúne pouco mais de 1 milhão de trajetórias reais de robôs em 22 tipos. Está muito aquém do necessário para generalização robusta.
Abordagens proprietárias — como as fábricas de dados da Tesla, em que colaboradores usam trajes de captura de movimento para gerar dados de treinamento — ajudam a colher gravações reais, mas têm custos elevados, pouca diversidade e escalabilidade limitada.
Para superar esses desafios, o setor utiliza três principais fontes de dados:
- Dados da internet: São vastos e fáceis de escalar, mas predominantemente observacionais e carentes de sinais sensório-motores. O pré-treinamento de grandes modelos visão-linguagem (como GPT-4V e Gemini) em dados da internet fornece bases semânticas e visuais valiosas. Anotar vídeos com informações cinemáticas transforma filmagens em conteúdo útil para treinamento.
- Dados sintéticos: Gerados por simulação, viabilizam experimentação massiva e cenários diversos, porém não reproduzem toda a complexidade real — limitação conhecida como “gap sim-para-real”. Para contornar, pesquisadores usam adaptação de domínio (data augmentation, randomização, aprendizado adversarial) e transferência de simulação para o real, refinando modelos com testes práticos.
Dados reais: Apesar de escassos e caros, são essenciais para validação dos modelos e aproximação prática. Os dados de maior qualidade geralmente incluem perspectivas egocêntricas (primeira pessoa) — capturando o que o robô “enxerga” — e o registro preciso de suas ações. Esse conteúdo é obtido por demonstrações humanas ou teleoperação com VR, dispositivos de captura de movimento ou ensino cinestésico, garantindo exemplos autênticos.
Pesquisas mostram que combinar dados de internet, reais e sintéticos no treinamento de robôs aumenta muito a eficiência e a robustez comparado ao uso isolado de apenas uma fonte.
Aumentar a quantidade de dados contribui, mas é a diversidade que mais impacta — principalmente para generalizar para novas tarefas e morfologias. Para isso, plataformas abertas e compartilhamento colaborativo são essenciais, viabilizando datasets cross-embodiment que suportam múltiplos tipos robóticos e modelos fundacionais mais sólidos.
Agente: “agente físico de IA”
A tendência de evolução para agentes físicos de IA — robôs autônomos atuando no mundo concreto — se acelera. O progresso depende de modelos refinados, aprendizado contínuo e adaptação à morfologia única de cada robô.
Destaques de oportunidades emergentes para acelerar essa evolução:
- Aprendizado contínuo e infraestrutura adaptativa: Sistemas que permitem robôs aprimorar habilidades em tempo real, aprendendo com feedback e experiências compartilhadas durante as operações
- Economia de agentes autônomos: Robôs atuando como agentes econômicos independentes — negociando recursos como processamento e dados sensoriais em marketplaces entre pares robot-to-robot, gerando receita por serviços tokenizados
- Sistemas multiagente: Plataformas e algoritmos que viabilizam coordenação, colaboração e otimização coletiva de robôs em rede
Convergência entre AI Robotics e Web3: Destravando um Mercado Massivo
Com a implementação prática dos robôs IA, gargalos estruturais — silos centralizados de dados/modelos, dificuldade de rastreamento e validação, exigências de privacidade e conformidade regulatória, e baixa interoperabilidade — dificultam a inovação e restringem ecossistemas escaláveis, robustos e economicamente viáveis.
Principais Desafios da Robótica de IA
Silos Centralizados de Dados & Modelos
Modelos robóticos demandam datasets grandes e diversos. O desenvolvimento atual é centralizado, fragmentado e caro, gerando sistemas isolados e pouco adaptáveis. Em ambientes reais e dinâmicos, robôs geralmente têm desempenho limitado por falta de diversidade e robustez dos dados.
Confiança, rastreabilidade e confiabilidade
Sem registros transparentes e auditáveis sobre origem de dados, treinamento de modelos e operações, a confiança e a responsabilidade são prejudicadas — obstáculos para adoção por usuários, reguladores e empresas.
Privacidade, segurança e conformidade regulatória
Aplicações sensíveis — como saúde e robótica residencial — exigem alta proteção de privacidade e conformidade regulatória rigorosa, sobretudo em regiões como a Europa (exemplo: GDPR). Infraestruturas centralizadas têm dificuldade para viabilizar colaboração segura em IA, restringindo compartilhamento de dados e freando inovação em setores regulados.
Escalabilidade & Interoperabilidade
Sistemas robóticos enfrentam obstáculos para compartilhar recursos, aprender colaborativamente e integrar diferentes plataformas e morfologias. Essas limitações fragmentam efeitos de rede e dificultam transferência rápida de capacidades entre robôs distintos.
AI Robotics x Web3: Soluções Estruturais e Novas Oportunidades
Tecnologias Web3 resolvem esses desafios ao viabilizar redes robóticas descentralizadas, verificáveis e colaborativas, preservando a privacidade. Essa convergência cria novos mercados investíveis:
Desenvolvimento colaborativo democratizado: Redes com incentivos para robôs compartilharem dados e desenvolverem modelos e agentes inteligentes em conjunto
- Rastreabilidade e responsabilidade verificáveis: O blockchain garante registros imutáveis de dados/modelos, identidades robóticas e histórico operacional — fundamentais para confiança e conformidade.
- Colaboração preservando privacidade: Soluções criptográficas avançadas permitem robôs treinarem modelos e compartilharem insights sem expor dados proprietários ou sensíveis
- Governança comunitária: DAOs (Organizações Autônomas Descentralizadas) promovem regras e políticas em blockchain transparentes e inclusivas, regulando e monitorando operações robóticas
- Interoperabilidade cross-embodiment: Frameworks abertos em blockchain viabilizam coordenação fluida entre diferentes plataformas robóticas, reduzindo custos de desenvolvimento e acelerando transferência de capacidades
- Economia de agentes autônomos: Infraestrutura Web3 capacita robôs como agentes econômicos independentes, permitindo transações entre pares, negociações e participação em mercados tokenizados sem intervenção humana
Redes descentralizadas de infraestrutura física (DePIN): Compartilhamento entre pares via blockchain de recursos de processamento, sensores, armazenamento e conectividade amplia escalabilidade e resiliência das redes robóticas
A seguir, alguns projetos emergentes que exemplificam o avanço e a dinâmica desse setor. Ressaltamos que este conteúdo é apenas informativo e não constitui recomendação financeira.
Dados & Modelos Descentralizados
Plataformas Web3 democratizam esses processos, incentivando contribuintes — seja via trajes de captura de movimento, compartilhamento de sensores, upload de imagens, anotação ou geração de dados sintéticos para simulação e treinamento de modelos. O resultado são datasets e modelos mais ricos, diversos e representativos, muito superiores ao que empresas isoladas podem atingir. Frameworks descentralizados também ampliam a cobertura de casos de exceção, essenciais para robôs em ambientes imprevisíveis.
Exemplo:
Frodobots: Protocolo para crowdsourcing de dados reais via jogos robóticos. Lançou o Earth Rovers, robô autônomo de passeio urbano, e o game “Drive to Earn” (Dirija para Ganhar). O resultado foi o FrodoBots 2K Dataset: acervo diversificado de imagens de câmera, dados de GPS, áudio e controle humano, coletados em cerca de 2 mil horas de operação tele-operada em mais de 10 cidades.
- BitRobot: Co-desenvolvido pela FrodoBots Lab e Protocol Labs, é uma plataforma cripto-incentivada baseada em Solana com arquitetura de sub-redes. Promove colaboração global e inovação open-source em robótica e IA, organizando cada subnet como desafio aberto. Contribuintes podem enviar modelos ou dados e receber recompensas em tokens, estimulando engajamento e aprimoramento contínuo.
- Reborn Network: Camada fundacional para ecossistema aberto de robôs AGI. Inclui o Rebocap, traje de captura de movimento para registro e monetização de movimentos reais, que viabiliza datasets abertos fundamentais para robótica humanoide avançada.
PrismaX: Infraestrutura descentralizada que garante diversidade e autenticidade de dados por meio de uma comunidade global de colaboradores. Implementa mecanismos robustos de validação e incentivos para dados visuais em larga escala, permitindo expansão eficiente de datasets para robótica.
Prova de Origem e Confiabilidade
Blockchain proporciona transparência e responsabilidade total no ecossistema robótico. Garante rastreabilidade comprovada de dados e modelos, autentica identidades e localizações físicas dos robôs e mantém registros claros de operações e contribuições. Sistemas colaborativos de verificação, reputação em blockchain e validação por staking asseguram a qualidade de dados e modelos, protegendo contra insumos fraudulentos ou de baixa qualidade.
Exemplo:
OpenLedger: Infraestrutura AI-blockchain para treinar e implementar modelos especializados com datasets comunitários. Usa Proof of Attribution para garantir remuneração justa de contribuintes de dados de alta qualidade.
Licenciamento, Monetização e Propriedade Tokenizada
Ferramentas Web3 nativas de IP viabilizam licenciamento tokenizado de datasets, modelos, agentes inteligentes e capacidades robóticas. Contribuintes podem anexar termos de licenciamento via contratos inteligentes (smart contracts), assegurando pagamentos automáticos de royalties sempre que dados ou modelos forem utilizados ou monetizados. Essa abordagem cria mercados abertos, transparentes e justos para dados e modelos de robótica.
Exemplo:
Poseidon: Camada de dados descentralizada baseada no Story Protocol, centrado em IP e incubado pela Story team, projetada para prover dados licenciados e legais para treinar AI.
Soluções para Preservação de Privacidade
Dados de alto valor — coletados em hospitais, hotéis ou residências — são difíceis de acessar de modo público, mas oferecem contexto valioso que pode aprimorar fortemente o desempenho dos modelos fundacionais. Transformar dados privados em ativos em blockchain com soluções criptográficas os torna rastreáveis, integráveis e monetizáveis, mantendo a privacidade. Tecnologias como Trusted Execution Environments (TEEs) e Zero-Knowledge Proofs (ZKPs) permitem processamento seguro e verificação sem expor dados brutos. Com essas ferramentas, organizações treinam modelos de IA em datasets sensíveis e distribuídos, mantendo privacidade e conformidade regulatória.
Exemplo:
Phala Network: Permite que desenvolvedores implementem aplicações em TEEs seguros para processamento confidencial de IA e dados.
Governança Aberta e Responsável
O treinamento dos robôs geralmente depende de sistemas proprietários e fechados, sem transparência ou flexibilidade. Governança transparente e verificável é fundamental para mitigar riscos e criar confiança entre usuários, reguladores e empresas. Tecnologias Web3 tornam possível a supervisão comunitária em blockchain e o desenvolvimento colaborativo da inteligência robótica open-source.
Exemplo:
Openmind: Stack de software AI aberto que permite aos robôs pensar, aprender e colaborar. Recentemente propôs o padrão ERC7777, que busca criar um ecossistema robótico verificável, baseado em regras, com foco em segurança, transparência e escalabilidade. Define interfaces padronizadas para gestão de identidades humanas e robóticas, definição de regras sociais, registro e exclusão de participantes, com direitos e responsabilidades associados.
Considerações finais
O futuro da convergência entre AI robotics e Web3 inaugura uma nova era de sistemas autônomos capazes de colaboração e adaptação em grande escala. Com avanços rápidos em hardware, os próximos 3–5 anos serão essenciais para a construção de modelos de IA cada vez mais sofisticados, impulsionados por datasets reais e coordenação descentralizada. Devemos presenciar agentes inteligentes especializados em segmentos como hospitalidade, logística e vários outros, criando novas oportunidades de mercado substanciais.
Entretanto, embora a convergência entre AI robotics e cripto seja promissora, essa transição também traz desafios. Elaborar mecanismos de incentivos equilibrados e eficientes exige soluções inovadoras para recompensar os contribuidores de forma justa e evitar abusos. A complexidade técnica é um fator determinante, exigindo soluções robustas e escaláveis para integrar diferentes morfologias robóticas. Tecnologias para preservação de privacidade precisam ser verdadeiramente confiáveis para conquistar a confiança dos stakeholders, especialmente diante de dados sensíveis. O ambiente regulatório está em constante evolução, exigindo atenção e adaptação para assegurar conformidade regulatória em diversas jurisdições. Enfrentar os riscos e gerar retornos sustentáveis é indispensável para garantir progresso concreto e adoção massiva.
Vamos acompanhar de perto essas evoluções — a colaboração é fundamental para impulsionar o progresso e explorar as oportunidades que surgem nesse mercado em acelerada expansão.
A inovação na robótica é uma jornada que se fortalece com a colaboração :)
Agradeço à equipe Chain of Thought pelo artigo Robotics & The Age of Physical AI, que foi fonte fundamental para esta pesquisa.
Avisos:
- Este artigo é reproduzido de [merakiki.eth]. Todos os direitos pertencem ao autor original [@merakikieth">merakiki]. Caso haja objeções à reprodução, entre em contato com a equipe Gate Learn, que tomará as providências cabíveis.
- Aviso de responsabilidade: As opiniões expressas neste artigo pertencem exclusivamente ao autor e não representam recomendação de investimento.
- As traduções para outros idiomas são feitas pela equipe Gate Learn. Salvo indicação expressa, é proibido copiar, distribuir ou plagiar os artigos traduzidos.